力控制器控制轮子,小车并不能移动
-
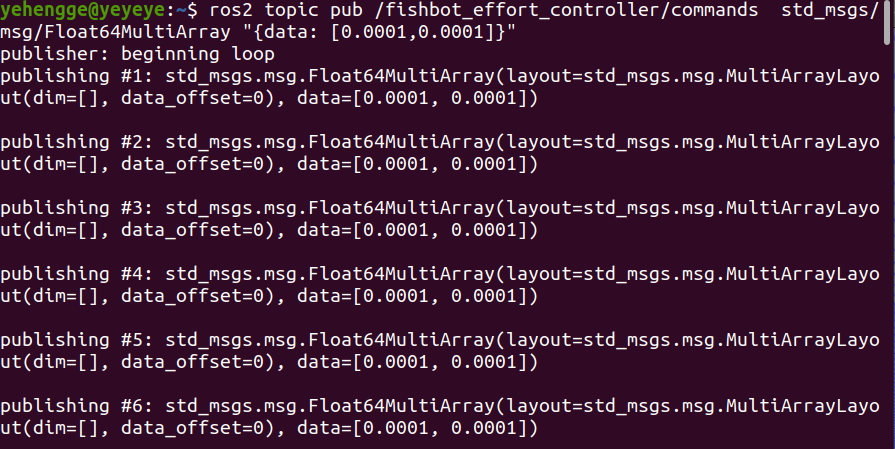
用list_hardware_interfaces 是查看到effort相关的输出,然后查看控制器状态也是active,但是就是不能让小车动起来
-
当您遇到力控制器(Effort Controller)控制轮子但小车不动的问题时,可能有多种原因。以下是一些检查和排查步骤,帮助您诊断并解决问题:
-
确认硬件接口配置:
- 使用
list_hardware_interfaces确认所有相关的硬件接口(如 effort_controllers)都已正确加载并配置。 - 确保所有必需的传感器(如编码器、力传感器等)都已正确连接并能在ROS中读取数据。
- 使用
-
检查控制器配置:
- 审查您的机器人描述文件(如 URDF 或 XACRO),确保轮子关节(joint)被正确定义为可以通过力控制的类型(如 continuous 或 revolute,并配置有正确的 effort limits)。
- 查看控制器的配置文件(YAML 文件),确保目标关节、控制增益(如 P、D 增益)和其他参数都已正确设置。
-
控制器状态:
- 虽然控制器状态显示为 active,但还需要检查具体的控制输出和状态反馈。使用
rostopic echo命令查看相关话题(如/joint_states、/your_controller_name/command和/your_controller_name/state)的输出,确保控制指令被正确发送且状态信息合理。
- 虽然控制器状态显示为 active,但还需要检查具体的控制输出和状态反馈。使用
-
物理限制和摩擦:
- 考虑是否存在物理上的限制,如轮子被固定或地面摩擦力过大。
- 检查电机和驱动系统是否工作正常,包括电源连接和电机温度。
-
软件日志和调试:
- 查看 ROS 控制器的日志输出,使用
roslaunch或rosrun时添加--screen参数可以帮助您实时看到日志输出。 - 如果可能,增加日志级别以获取更详细的调试信息。
- 查看 ROS 控制器的日志输出,使用
-
软件版本和兼容性:
- 确保您使用的 ROS 版本、机器人描述文件、控制器代码和其他相关软件都是兼容的。
- 检查是否有已知的软件问题或 bug,并查看相关的 GitHub 问题跟踪器或社区论坛。
-
外部干扰:
- 确认没有其他外部因素(如电磁干扰)影响控制系统。
-
简化和测试:
- 如果可能,尝试简化系统配置,例如只控制一个轮子,以排除复杂的系统交互问题。
- 使用已知良好的硬件和软件组件进行测试,以确认问题是否由特定组件引起。
通过系统地检查和测试这些方面,您应该能够定位问题的根源,并采取相应的措施来解决它。如果问题依然存在,考虑寻求来自机器人制造商、ROS 社区或专业支持团队的帮助。
以上为生成回答,仅供参考~
-
-
@yeyeye 大力出奇迹,调大点试试