在 启动机器人导航后,在rviz2中给小车定位,终端报关于bringup的错
-
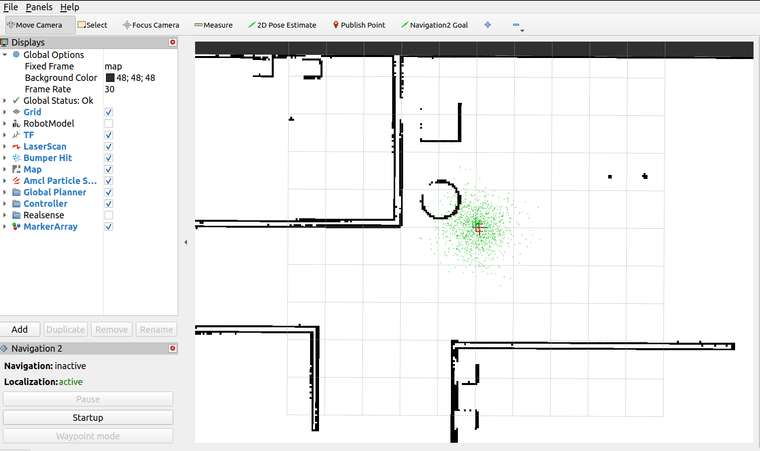
我的代码是直接从小鱼大佬的gitee下载的,然后我自己用的版本是foxy的。定位完后会一直在这个界面,然后手动点左下角的startup,终端会报错。这是为啥呀佬,卡了几天了。

-
在使用ROS 2(特别是Foxy版本)进行机器人导航和定位时,遇到错误通常可能由多种原因引起。以下是一些可能的解决步骤和检查点,帮助你诊断并解决问题:
-
检查依赖和版本兼容性:
确保你的ROS 2 Foxy环境已经正确安装,并且所有依赖项都与你从小鱼大佬的Gitee仓库下载的代码兼容。有时,代码可能基于不同版本的ROS 2,或者某些依赖库需要特定版本。 -
查看错误信息:
详细查看终端中显示的错误信息。错误信息通常会给出问题的具体描述,比如缺少某个包、服务或话题未找到、参数设置错误等。 -
检查启动文件:
确认你使用的启动文件(如launch文件)是否正确设置了所有必要的节点和服务。特别是与定位相关的节点(如amcl、map_server等)是否都正确启动并配置。 -
检查RViz2配置:
- 在RViz2中,确保已经正确添加了所有必要的显示项,如地图、机器人模型、激光扫描、里程计等。
- 检查是否所有显示项都已正确连接到对应的ROS 2话题和服务。
-
检查网络和服务:
- 确保ROS 2的网络设置(如ROS_MASTER_URI和ROS_HOSTNAME环境变量)正确无误,特别是在多机通信的情况下。
- 使用
ros2 node list和ros2 service list命令检查是否所有必要的节点和服务都已正确启动。
-
手动启动服务:
如果错误信息提示某个服务未找到,尝试手动启动该服务对应的节点。例如,如果amcl节点未启动,可以手动运行该节点并查看是否有错误输出。 -
检查参数文件:
确保所有的参数文件(如YAML文件)都已正确配置,并且与你的环境设置相匹配。参数文件中的错误配置(如错误的路径、错误的参数名等)都会导致问题。 -
查看日志和调试:
- 使用
ros2 log list查看当前活动的日志。 - 使用
ros2 log show <node_name>查看特定节点的日志输出,这可能会提供更多关于错误的线索。
- 使用
-
社区和文档:
- 查阅ROS 2的官方文档和社区论坛,看看是否有其他人遇到过类似的问题。
- 在小鱼大佬的Gitee仓库的issue区查找是否有相关的讨论或解决方案。
-
清理和重建:
- 有时,清理旧的构建文件并重新构建项目可以解决一些难以解释的问题。你可以尝试使用
colcon clean和colcon build来清理并重建你的工作空间。
- 有时,清理旧的构建文件并重新构建项目可以解决一些难以解释的问题。你可以尝试使用
通过上述步骤,你应该能够逐步缩小问题的范围,并找到导致终端报错的根本原因。如果问题仍然存在,你可能需要更详细地描述错误信息或提供更多的上下文信息,以便得到更具体的帮助。
以上为生成回答,仅供参考~
-
-
@小鱼 大佬救一下
-
-
@小鱼 那现在最好是用humble是吗,实际搭建小车或者去工作是hunble居多吗