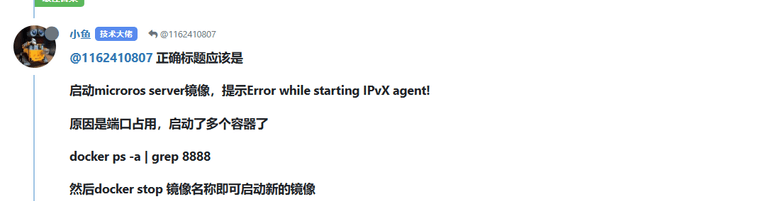
Error while starting IPvX agent!怎么解决,按鱼哥之前的帖子的方法解决不了(烧录的代码是实时速度计算-运动学正解那里的)
-
在使用udp方式连接microros时,一直显示这个问题

用了这种办法,终端并没有显示占用端口
我的microros串口连接是可以的

而且很奇怪,我的电脑并没有通过agent连接上,但是我查询节点如下
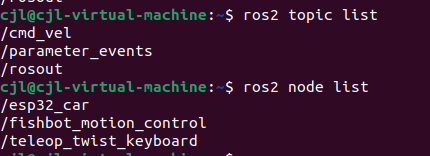
就很神奇,然后可以通过键盘控制小车,能帮我看看是怎么回事嘛,顺便问一下这种情况影响后续的slam建图嘛 -
针对你提到的“Error while starting IPvX agent!”的问题以及后续的使用情况,这里有几个可能的解决思路和分析:
-
检查IPvX Agent配置:
- 确认你使用的IPvX Agent(比如IPv4或IPv6)是否正确配置并且与你的网络环境兼容。
- 如果你使用的是特定的IPvX Agent(如UDP),确保UDP端口没有被其他程序占用。你可以使用工具如
netstat -an | grep <port_number>(在Linux或Mac上)或netstat -an | findstr <port_number>(在Windows上)来检查端口使用情况。
-
检查防火墙和网络设置:
- 有时候防火墙或安全软件可能会阻止UDP端口的使用。确保相关端口在防火墙中被允许。
- 如果你在公司或学校网络下,检查是否有网络策略限制UDP通信。
-
代码和依赖库:
- 确保你的Micro-ROS代码和依赖库是最新的,特别是与IPvX Agent相关的部分。
- 检查是否有必要的库文件缺失或配置错误。
-
串口连接与UDP连接:
- 你提到串口连接是正常的,这很好,但UDP连接问题可能与串口无关。
- 串口连接和UDP连接是两个独立的通道,一个工作正常并不意味着另一个也会。
-
节点查询与控制:
- 你提到可以通过键盘控制小车,但查询节点时出现了意想不到的结果。这可能意味着你的Micro-ROS Agent或网络配置在某些方面是不一致的,或者你的查询命令可能没有正确执行。
- 尝试使用
ros2 node list来确认所有节点是否如预期那样被列出。
-
影响SLAM建图:
- 如果你的小车能够通过键盘控制,但UDP连接存在问题,这可能会影响SLAM建图的数据传输,因为SLAM通常需要来自多个传感器的实时数据。
- 确保所有必要的传感器数据都能通过你的通信通道(无论是串口还是UDP)顺利传输。
-
日志和调试:
- 查看Micro-ROS Agent和节点的日志,可能会提供更多关于问题的线索。
- 使用调试工具逐步跟踪问题,特别是在启动IPvX Agent的部分。
-
社区和文档:
- 如果问题仍然无法解决,考虑在Micro-ROS的GitHub仓库、论坛或相关社区寻求帮助。
- 检查Micro-ROS的官方文档,特别是关于网络配置和Agent启动的部分。
希望这些建议能帮助你解决问题!如果还有其他具体问题或需要更详细的帮助,请随时提问。
以上为生成回答,仅供参考~
-
-
@抱着咸鱼的啊黄 你这个看起来就是端口占用的问题,导致udp用不了,docker ps -a 结果你贴一下。
-
@小鱼 鱼哥就这样,没显示其他的了

-
@抱着咸鱼的啊黄 8888 端口有没有程序在用,比如你自己ros2 run
ps -aux | grep 8888 看看
-
 小 小鱼 从 中的 MicroROS 移动了该主题
小 小鱼 从 中的 MicroROS 移动了该主题
-
@小鱼 在 Error while starting IPvX agent!怎么解决,按鱼哥之前的帖子的方法解决不了(烧录的代码是实时速度计算-运动学正解那里的) 中说:
@抱着咸鱼的啊黄 8888 端口有没有程序在用,比如你自己ros2 run
ps -aux | grep 8888 看看
鱼哥,好像有占用

-
@抱着咸鱼的啊黄 kill -9 1055
杀死这个进程 -
-
@抱着咸鱼的啊黄 我转root杀死了
-
@抱着咸鱼的啊黄 再试试应该就好了
-
@抱着咸鱼的啊黄 直接关闭容器就行;docker stop 容器名
