rviz识别urdf出错
-
Errors loading geometries:
• for link 'Link1':
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link1.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link1.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link1.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link1.STL'
• for link 'Link2':
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link2.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link2.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link2.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link2.STL'
• for link 'Link3':
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link3.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link3.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link3.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link3.STL'
• for link 'Link4':
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link4.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link4.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link4.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link4.STL'
• for link 'Link5':
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link5.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link5.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link5.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/Link5.STL'
• for link 'base_link':
Could not load mesh resource 'package://J-整体模型v1.0/meshes/base_link.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/base_link.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/base_link.STL'
Could not load mesh resource 'package://J-整体模型v1.0/meshes/base_link.STL'
如图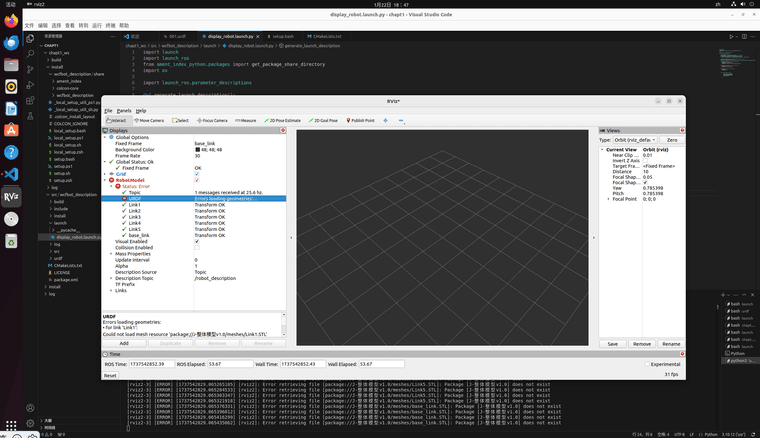
-
根据您提供的错误信息,RViz 在尝试加载 URDF 文件中的几何体时遇到了问题,具体是无法找到或加载指定的 STL 文件。这些错误通常表明以下几个可能的问题:
-
文件路径错误:
- 确保在 URDF 文件中指定的 STL 文件路径正确无误。检查路径中的每个部分,包括包名、文件夹名和文件名,确保它们完全匹配实际的文件结构。
-
文件不存在:
- 验证 STL 文件是否确实存在于指定的路径下。可以在 ROS 工作空间中运行
roscd命令来导航到包目录,然后检查meshes文件夹中是否有所需的 STL 文件。 - 例如,运行
roscd J-整体模型v1.0/meshes并检查当前目录下是否有Link1.STL等文件。
- 验证 STL 文件是否确实存在于指定的路径下。可以在 ROS 工作空间中运行
-
包未正确安装或设置:
- 确保
J-整体模型v1.0这个包已经被正确安装,并且工作空间已经被正确编译。可以使用catkin_make或catkin build来编译工作空间。 - 检查
.catkin_workspace文件和setup.bash文件是否已正确设置环境变量。
- 确保
-
ROS 环境变量问题:
- 确保你已经 source 了你的 ROS 工作空间的
setup.bash文件。这通常在你的.bashrc或.zshrc文件中设置,或者你可以在终端中手动运行source ~/catkin_ws/devel/setup.bash(路径根据你的工作空间位置调整)。
- 确保你已经 source 了你的 ROS 工作空间的
-
文件权限问题:
- 确保你有足够的权限访问这些文件。在 Linux 系统中,你可以使用
ls -l命令查看文件权限,使用chmod命令修改权限。
- 确保你有足够的权限访问这些文件。在 Linux 系统中,你可以使用
-
RViz 配置问题:
- 确保在 RViz 中正确加载了 URDF 文件。通常,你会在 RViz 的 "Add" 菜单下选择 "By display type" -> "URDF" -> "Add",然后浏览或输入 URDF 文件的路径。
如果以上步骤都确认无误但问题依旧存在,尝试以下调试步骤:
- 清除并重新编译你的 ROS 工作空间。
- 重启你的终端或计算机,以确保所有环境变量更新。
- 检查是否有其他 ROS 节点或进程可能干扰了文件访问。
希望这些信息能帮助你解决问题!如果问题仍然存在,可能需要更详细地检查 URDF 文件的具体内容和格式。
以上为生成回答,仅供参考~
-
-
@小伊 在ros2环境下,将urdf模型导入rviz2,如何检查 meshes 文件夹中是否有所需的 STL 文件
-
在ROS2环境下,将URDF模型导入RViz2时,确实需要检查
meshes文件夹中是否包含URDF文件中引用的所有STL文件。以下是一些具体的步骤和建议来执行这一检查:一、确认URDF文件中的引用
- 打开URDF文件:使用文本编辑器或专门的XML编辑器打开你的URDF文件。
- 查找
<mesh>标签:在URDF文件中,<mesh>标签用于指定网格文件的路径和名称。例如,<mesh filename="package://your_package_name/meshes/your_mesh.STL"/>。 - 记录引用路径:记录下所有
<mesh>标签中引用的STL文件的路径和名称。
二、检查
meshes文件夹- 定位
meshes文件夹:根据你的ROS2工作空间结构,找到包含meshes文件夹的包(package)。通常,这个文件夹会与URDF文件位于同一层级或相近的位置。 - 打开
meshes文件夹:使用文件管理器打开meshes文件夹。 - 核对STL文件:检查
meshes文件夹中是否包含你在URDF文件中记录的所有STL文件。确保文件名和扩展名与URDF文件中的引用完全匹配。
三、解决常见问题
- 路径错误:如果URDF文件中的
<mesh>标签路径不正确,RViz2将无法加载STL文件。确保路径使用package://前缀,并正确指向包含STL文件的包和文件夹。 - 文件缺失:如果
meshes文件夹中缺少某个STL文件,RViz2在加载URDF模型时会报错。确保所有引用的STL文件都已正确放置在meshes文件夹中。 - 权限问题:确保你有足够的权限访问
meshes文件夹和其中的STL文件。在某些情况下,文件权限问题可能导致RViz2无法加载文件。
四、验证加载结果
- 启动RViz2:在ROS2环境中启动RViz2。
- 添加URDF显示:在RViz2界面中,点击左上角的“Add”按钮,搜索并选择“URDF”显示类型。然后,在属性窗口中设置“URDF file”为你的URDF文件路径。
- 检查模型显示:确保RViz2的3D窗口中正确显示了加载的机器人模型。如果模型显示不完整或缺少某些部分,可能是因为STL文件未正确加载。
通过以上步骤,你可以有效地检查
meshes文件夹中是否包含URDF模型所需的所有STL文件,并确保它们在RViz2中正确加载和显示。
以上为生成回答,仅供参考~
-
@小伊 [INFO] [launch]: All log files can be found below /home/wcf/.ros/log/2025-01-22-20-11-22-482101-wcf-virtual-machine-11259
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [11263]
[INFO] [joint_state_publisher-2]: process started with pid [11265]
[INFO] [rviz2-3]: process started with pid [11267]
[robot_state_publisher-1] [WARN] [1737547882.589269601] [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
[robot_state_publisher-1] [INFO] [1737547882.589392560] [robot_state_publisher]: got segment Link1
[robot_state_publisher-1] [INFO] [1737547882.589477876] [robot_state_publisher]: got segment Link2
[robot_state_publisher-1] [INFO] [1737547882.589484187] [robot_state_publisher]: got segment Link3
[robot_state_publisher-1] [INFO] [1737547882.589489001] [robot_state_publisher]: got segment Link4
[robot_state_publisher-1] [INFO] [1737547882.589493974] [robot_state_publisher]: got segment Link5
[robot_state_publisher-1] [INFO] [1737547882.589498787] [robot_state_publisher]: got segment base_link
[rviz2-3] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in ""
[joint_state_publisher-2] [INFO] [1737547882.870397980] [joint_state_publisher]: Waiting for robot_description to be published on the robot_description topic...
[rviz2-3] [INFO] [1737547882.889843118] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-3] [INFO] [1737547882.889922242] [rviz2]: OpenGl version: 4.3 (GLSL 4.3)
[rviz2-3] [INFO] [1737547882.925552564] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-3] [ERROR] [1737547903.803855367] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link1.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.803927084] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link1.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.803955511] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link1.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.803974714] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link1.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.804979759] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link2.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805033086] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link2.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805054827] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link2.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805074610] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link2.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805160906] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link3.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805180393] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link3.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805199007] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link3.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805217281] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link3.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805259725] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link4.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805278716] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link4.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805298002] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link4.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805316765] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link4.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805364587] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link5.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805383902] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link5.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805403269] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link5.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805421929] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link5.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805458731] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/base_link.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805477871] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/base_link.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805497088] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/base_link.STL]: Package [home] does not exist
[rviz2-3] [ERROR] [1737547903.805532974] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/base_link.STL]: Package [home] does not exist -
从日志信息中,我们可以看到几个关键问题和警告,以及一些正常启动的信息。下面是对这些问题的分析和可能的解决方案:
-
URDF中的根链接(base_link)惯性问题:
- 警告信息:
[WARN] [1737547882.589269601] [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF. - 解决方案:KDL(Kinematics and Dynamics Library)不支持在URDF文件的根链接中指定惯性。你可以通过在URDF中添加一个额外的虚拟链接(dummy link)作为根链接的子链接,并在该虚拟链接中指定惯性来解决这个问题。
- 警告信息:
-
Qt平台插件问题:
- 信息:
[rviz2-3] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in "" - 解决方案:这通常意味着Qt运行时未能找到Wayland平台插件。这可能是因为环境配置问题或Qt安装不完整。确保Qt的安装包含了Wayland支持,或者如果你的系统不使用Wayland,尝试配置Qt使用其他平台插件(如X11)。
- 信息:
-
RViz2无法找到STL文件:
- 错误信息:
[ERROR] [rviz2]: Error retrieving file [package://home/wcf/chapt1/chapt1_ws/src/wcfbot_description/meshes/Link1.STL]: Package [home] does not exist(对于所有链接的STL文件) - 解决方案:这些错误表明RViz2无法找到指定的STL文件,因为路径中的
package://home/...是不正确的。通常,路径应该类似于package://wcfbot_description/meshes/Link1.STL。检查你的URDF或启动文件,确保STL文件的路径正确无误,并且这些文件确实位于ROS工作空间的相应位置。你可能需要更新URDF中的mesh资源路径,去掉错误的home/wcf/chapt1/前缀。
- 错误信息:
-
RViz2不支持立体显示:
- 信息:
[rviz2-3] [INFO] [1737547882.889843118] [rviz2]: Stereo is NOT SUPPORTED - 说明:这是一个信息性消息,表明RViz2当前配置不支持立体显示。这通常不是一个问题,除非你需要使用立体视觉功能。
- 信息:
-
进程启动信息:
- 日志中的
[INFO] [launch]: ...和[INFO] [robot_state_publisher-1]: process started with pid [11263]等消息表明相关进程已成功启动。
- 日志中的
综上所述,你需要检查并修正URDF中的惯性指定、Qt平台插件配置以及STL文件的路径问题。这些步骤应该能帮助你解决当前遇到的主要问题。
以上为生成回答,仅供参考~
-
-
@小伊 INFO] [launch]: All log files can be found below /home/wcf/.ros/log/2025-01-22-20-23-11-010205-wcf-virtual-machine-12364
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [12367]
[INFO] [joint_state_publisher-2]: process started with pid [12369]
[INFO] [rviz2-3]: process started with pid [12371]
[rviz2-3] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in ""
[robot_state_publisher-1] [WARN] [1737548591.066341086] [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
[robot_state_publisher-1] [INFO] [1737548591.066407637] [robot_state_publisher]: got segment Link1
[robot_state_publisher-1] [INFO] [1737548591.066451356] [robot_state_publisher]: got segment Link2
[robot_state_publisher-1] [INFO] [1737548591.066456952] [robot_state_publisher]: got segment Link3
[robot_state_publisher-1] [INFO] [1737548591.066461615] [robot_state_publisher]: got segment Link4
[robot_state_publisher-1] [INFO] [1737548591.066466211] [robot_state_publisher]: got segment Link5
[robot_state_publisher-1] [INFO] [1737548591.066470776] [robot_state_publisher]: got segment base_link
[rviz2-3] [INFO] [1737548591.248938583] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-3] [INFO] [1737548591.248999505] [rviz2]: OpenGl version: 4.3 (GLSL 4.3)
[joint_state_publisher-2] [INFO] [1737548591.251488438] [joint_state_publisher]: Waiting for robot_description to be published on the robot_description topic...
[rviz2-3] [INFO] [1737548591.269473852] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-3] [ERROR] [1737548611.086538466] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL
[rviz2-3] [ERROR] [1737548611.086611755] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL
[rviz2-3] [ERROR] [1737548611.086656965] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL
[rviz2-3] [ERROR] [1737548611.086692598] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link1.STL
[rviz2-3] [ERROR] [1737548611.087107769] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL
[rviz2-3] [ERROR] [1737548611.087152446] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL
[rviz2-3] [ERROR] [1737548611.087188779] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL
[rviz2-3] [ERROR] [1737548611.087223976] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link2.STL
[rviz2-3] [ERROR] [1737548611.087317367] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL
[rviz2-3] [ERROR] [1737548611.087383473] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL
[rviz2-3] [ERROR] [1737548611.087424835] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL
[rviz2-3] [ERROR] [1737548611.087460305] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link3.STL
[rviz2-3] [ERROR] [1737548611.087526964] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL
[rviz2-3] [ERROR] [1737548611.087563020] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL
[rviz2-3] [ERROR] [1737548611.087623127] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL
[rviz2-3] [ERROR] [1737548611.087658200] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link4.STL
[rviz2-3] [ERROR] [1737548611.087719507] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL
[rviz2-3] [ERROR] [1737548611.087756638] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL
[rviz2-3] [ERROR] [1737548611.087793838] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL
[rviz2-3] [ERROR] [1737548611.087831260] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/Link5.STL
[rviz2-3] [ERROR] [1737548611.087889230] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL
[rviz2-3] [ERROR] [1737548611.087924912] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL
[rviz2-3] [ERROR] [1737548611.087959904] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL
[rviz2-3] [ERROR] [1737548611.087995202] [rviz2]: Error retrieving file [file:///home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL]: Couldn't open file /home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/base_link.STL -
从日志信息来看,您在启动ROS(Robot Operating System)环境时遇到了一些问题。以下是对日志中各个问题的解析和建议:
-
Qt平台插件问题:
[rviz2-3] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in ""- 这个错误提示
rviz2(ROS的可视化工具)在尝试使用Wayland显示服务器时未能找到相应的Qt平台插件。如果您不是在Wayland环境下运行,或者不需要使用Wayland,这个问题可能不会影响rviz2的功能。但是,如果您确实需要在Wayland环境下运行,您可能需要确保Qt的Wayland插件已正确安装并配置。
-
KDL解析器警告:
[robot_state_publisher-1] [WARN] ... [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia.- 这个警告指出URDF(统一机器人描述格式)文件中为根链接
base_link指定了惯性,但KDL(Kinematics and Dynamics Library)不支持根链接具有惯性。作为解决方案,您可以在URDF中添加一个额外的虚拟链接,而不是直接在根链接上指定惯性。
-
RViz2文件访问错误:
[rviz2-3] [ERROR] ... [rviz2]: Error retrieving file [...] Couldn't open file ...- 这些错误表明
rviz2无法访问指定的STL文件。这通常意味着文件路径不正确,或者文件根本不存在于指定的位置。您需要检查/home/wcf/chapt1/chapt1_ws/install/wcfbot_description/share/wcfbot_description/meshes/目录下是否确实存在这些STL文件。如果文件不存在,您需要确保它们已被正确放置或生成。
-
日志位置和默认日志等级:
- 日志信息还显示了日志文件的存储位置和默认的日志等级,这些信息对于调试和记录系统行为是有用的。
针对上述问题,您可以采取以下步骤进行解决:
- 确认您的显示服务器配置(Wayland或X11),并确保Qt的相应插件已安装。
- 修改URDF文件,添加一个虚拟链接来处理根链接的惯性问题。
- 检查STL文件的路径和存在性,确保所有需要的文件都已正确放置在指定位置。
希望这些信息能帮助您解决问题!如果还有其他疑问或需要进一步的帮助,请继续提问。
以上为生成回答,仅供参考~
-
-
@小伊 Errors loading geometries:
• for link 'Link1':
Could not load mesh resource 'package://wcfbot_description/meshes/Link1.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link1.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link1.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link1.STL'
• for link 'Link2':
Could not load mesh resource 'package://wcfbot_description/meshes/Link2.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link2.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link2.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link2.STL'
• for link 'Link3':
Could not load mesh resource 'package://wcfbot_description/meshes/Link3.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link3.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link3.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link3.STL'
• for link 'Link4':
Could not load mesh resource 'package://wcfbot_description/meshes/Link4.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link4.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link4.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link4.STL'
• for link 'Link5':
Could not load mesh resource 'package://wcfbot_description/meshes/Link5.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link5.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link5.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/Link5.STL'
• for link 'base_link':
Could not load mesh resource 'package://wcfbot_description/meshes/base_link.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/base_link.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/base_link.STL'
Could not load mesh resource 'package://wcfbot_description/meshes/base_link.STL' -
这些错误信息表明在尝试加载名为
wcfbot_description的 ROS 包中的 STL 文件时遇到了问题。每个链接(Link1 到 Link5 以及 base_link)都试图加载对应的 STL 文件,但系统无法找到或无法访问这些文件。以下是一些可能的解决步骤:-
检查文件路径和文件名:
- 确保 STL 文件确实存在于
wcfbot_description/meshes/目录下。 - 检查文件名是否完全匹配,包括大小写。Linux 文件系统是区分大小写的。
- 确保 STL 文件确实存在于
-
检查 ROS 工作空间:
- 确保
wcfbot_description包已经被正确编译并安装在你的 ROS 工作空间中。 - 使用
roscd wcfbot_description命令来检查是否能够导航到该包的目录。 - 在该目录下,检查
meshes/文件夹是否存在以及是否包含所需的 STL 文件。
- 确保
-
检查 ROS 环境变量:
- 确保你的 ROS 环境变量(如
ROS_PACKAGE_PATH)包含了包含wcfbot_description包的路径。 - 可以通过
echo $ROS_PACKAGE_PATH查看当前的 ROS 包路径设置。
- 确保你的 ROS 环境变量(如
-
文件权限问题:
- 确保你有足够的权限访问这些 STL 文件。在 Linux 上,你可以使用
ls -l命令查看文件权限。
- 确保你有足够的权限访问这些 STL 文件。在 Linux 上,你可以使用
-
重新编译 ROS 包:
- 如果文件确实存在但问题依旧,尝试在 ROS 工作空间中重新编译该包。使用
cd命令进入工作空间的根目录,然后运行catkin_make或catkin build。
- 如果文件确实存在但问题依旧,尝试在 ROS 工作空间中重新编译该包。使用
-
清理 ROS 缓存:
- 有时候,清理 ROS 的缓存可以解决一些加载问题。可以尝试删除
~/.ros/目录下的缓存文件,或者重新启动你的 ROS 核心(如 roscore)。
- 有时候,清理 ROS 的缓存可以解决一些加载问题。可以尝试删除
-
检查 ROS 日志:
- 查看 ROS 的日志文件,可能会有更详细的错误信息帮助你诊断问题。
如果以上步骤都不能解决问题,可能需要检查是否有其他软件或配置问题影响到 ROS 包的资源加载。
以上为生成回答,仅供参考~
-