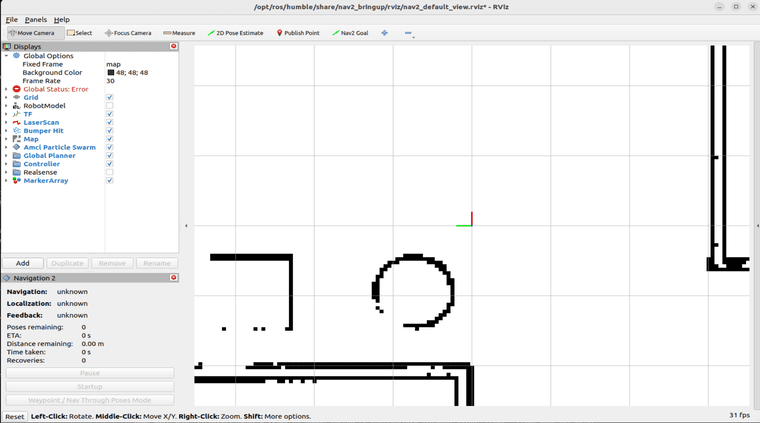
请问为什么运行第七章的编写launch并启动导航出现下面错误
-

并且按照教学视频里面放置2D Pose Estimate 点后,没有反应,左下角依然为unknown状态,源码是直接从gitee仓库拷贝来的
求解答
-
针对您运行第七章的编写launch并启动导航时出现的错误,以及2D Pose Estimate点无反应的问题,这里提供一些可能的解决思路:
一、运行错误的可能原因及解决方案
-
ROS2环境配置问题:
- 确保ROS2已经正确安装,并且环境变量如
PYTHONPATH和ROS_DISTRO已经正确设置。 - 检查
.bashrc或.zshrc文件中是否包含了ROS2的路径,并重新加载这些配置文件。
- 确保ROS2已经正确安装,并且环境变量如
-
依赖包未安装或安装不正确:
- 检查是否所有必要的ROS2包都已经安装,特别是与launch和导航相关的包。
- 可以尝试重新安装或更新这些包。
-
launch文件编写错误:
- 检查launch文件是否有语法错误或导入错误。
- 确保所有的节点和参数都已经正确配置。
-
源码问题:
- 如果源码是从gitee仓库拷贝的,确保拷贝过程中没有遗漏文件或目录。
- 检查源码是否与您的ROS2版本兼容。
二、2D Pose Estimate点无反应的可能原因及解决方案
-
节点未启动:
- 确保与2D Pose Estimate相关的节点已经正确启动。
- 检查ROS2的话题和服务,确保它们已经正确发布和调用。
-
依赖关系未满足:
- 2D Pose Estimate可能依赖于其他节点或服务,确保这些依赖已经正确配置和启动。
-
UI界面问题:
- 检查RViz或其他可视化工具是否正确加载了地图和定位信息。
- 确保左下角的状态栏没有显示其他错误信息。
-
源码或配置问题:
- 如果源码是从gitee仓库拷贝的,确保没有修改过与2D Pose Estimate相关的代码或配置文件。
- 检查是否有其他用户报告了相同的问题,并在Gitee的issue页面或相关社区中寻求帮助。
三、一般调试建议
- 查看日志:使用
ros2 node list和ros2 topic list等命令查看当前运行的节点和话题,使用ros2 log list查看日志信息,以获取更多关于错误的线索。 - 逐步排查:从简单的节点开始逐步添加复杂性,每次添加后都进行测试,以确定问题出现的具体位置。
- 寻求帮助:如果问题依然无法解决,可以在ROS2的社区论坛、Gitee的issue页面或其他相关社区中寻求帮助,提供尽可能详细的信息和日志。
综上所述,运行错误和2D Pose Estimate点无反应的问题可能涉及多个方面,需要逐一排查并找到具体的解决方案。希望这些建议能对您有所帮助!
以上为生成回答,仅供参考~
-