坐标变换问题讨论
-
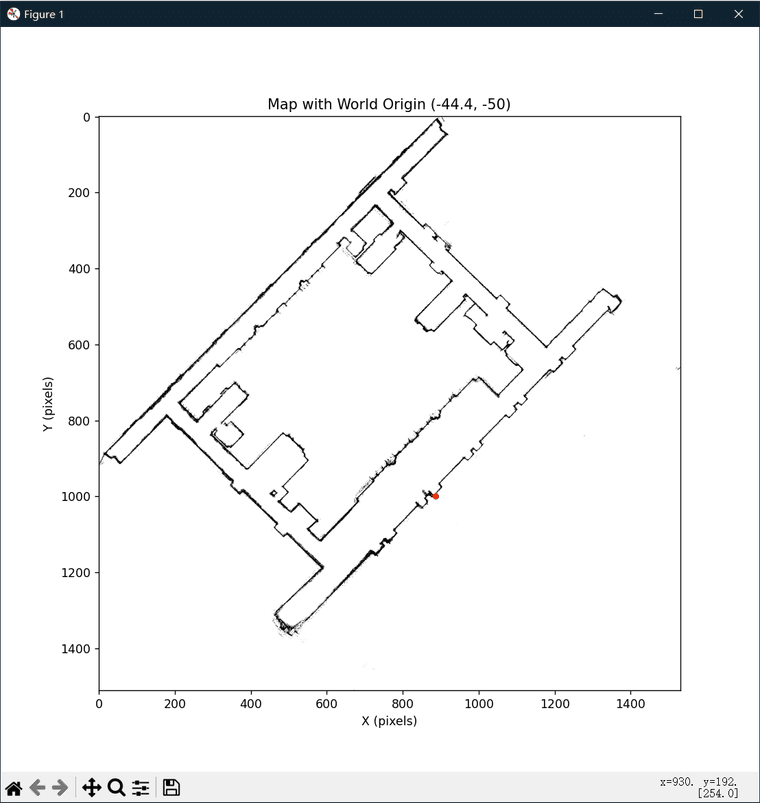
使用Cartographer建图后得到了一个pgm地图和yaml文件,其中origin为[-44.4, -50, 0],resolution为0.05,已经根据数据在地图中用红点标注出了坐标
问题是,导航的时候Nav2将地图加载后,计算起始点和目标点之间坐标时,是基于哪个坐标系进行路径规划的,是origin,还是map原点还是别的?求解答 -
在导航过程中,当Nav2加载地图并计算起始点和目标点之间的坐标时,它并不是基于地图文件(如pgm和yaml中定义的)中的
origin进行路径规划的,而是基于一个固定的、全局的map坐标系。以下是对此问题的详细解答:1. map坐标系
- 定义:map坐标系是机器人在构建地图时确定的固定坐标系,它代表了机器人所在的环境的全局坐标系。
- 特点:map坐标系的原点(0,0点)是地图构建时的参考点,一旦确定,就不会再改变。这个坐标系与机器人当前的位置、姿态无关,是一个绝对的、全局的参考框架。
2. origin参数
- 定义:在地图文件(如yaml文件)中定义的
origin参数,表示地图数据相对于某个参考点的偏移量。 - 作用:
origin参数主要用于地图数据的对齐和转换,确保地图数据在加载到导航系统中时能够正确地与全局的map坐标系对应起来。 - 与路径规划的关系:虽然
origin参数在地图加载和转换过程中起到了重要作用,但它并不直接影响Nav2的路径规划。Nav2在进行路径规划时,是基于已经加载到全局map坐标系中的地图数据进行的。
3. 路径规划过程
- 全局路径规划:Nav2根据全局map坐标系中的地图数据,使用全局路径规划算法(如A*或Dijkstra算法)来计算从起始点到目标点的最优路径。
- 局部路径规划:在机器人运动过程中,Nav2还会结合实时传感器数据(如激光雷达、深度相机等)进行局部路径规划,以避开动态障碍物并调整路径。
4. 坐标变换
- 在机器人系统中,通常使用TF(Transform)库来管理不同坐标系之间的变换关系。
- 当机器人上的传感器(如激光雷达)或其他部件(如机器人底座)相对于全局map坐标系有偏移时,TF库可以计算这些偏移量,并在需要时进行坐标变换。
- 在导航过程中,Nav2会利用TF库来确保机器人当前的位置、姿态以及传感器数据能够与全局map坐标系正确对应起来,从而实现准确的路径规划和避障。
综上所述,Nav2在进行路径规划时是基于全局的map坐标系进行的,而不是基于地图文件中的
origin参数。origin参数主要用于地图数据的对齐和转换,以确保地图数据能够正确地加载到全局map坐标系中。
以上为生成回答,仅供参考~
-
@小伊 那从origin到map坐标系的变换是怎么进行的?
-
从Origin坐标系到Map坐标系的变换通常涉及将一种坐标系统转换为另一种坐标系统,这在不同领域(如地理信息系统、数据分析、科学计算等)中是一个常见的需求。然而,这种变换的具体过程和方法可能因Origin坐标系和Map坐标系的定义、数据的性质以及所使用的软件工具而有所不同。
在一般情况下,坐标变换可能包括以下几个步骤:
-
确定坐标系统:
- 首先需要明确Origin坐标系和Map坐标系的定义和参数。例如,Origin坐标系可能是基于某个特定的数据集的自定义坐标系,而Map坐标系可能是地理坐标系(如WGS84)或投影坐标系(如UTM)。
-
数据准备:
- 将需要变换的坐标数据准备好,确保数据的准确性和完整性。这可能包括经纬度坐标、平面坐标或其他形式的坐标数据。
-
选择变换方法:
- 根据坐标系统的类型和数据的性质,选择合适的坐标变换方法。例如,如果Origin坐标系和Map坐标系都是地理坐标系,可能需要进行地理坐标转换(如经纬度转换);如果涉及投影坐标系,可能需要进行投影变换。
-
执行变换:
- 使用专业的软件工具(如GIS软件、数据分析软件等)执行坐标变换。这些工具通常提供内置的坐标变换功能,用户只需按照提示输入原始坐标和目标坐标系统,即可获得变换后的坐标。
-
验证结果:
- 对变换后的坐标进行验证,确保变换的准确性和可靠性。这可以通过与已知点进行比较、检查变换后的数据分布等方式进行。
需要注意的是,具体的坐标变换过程可能因软件工具的不同而有所差异。例如,在Origin软件中,虽然它主要用于数据分析和绘图,但也可能提供某些坐标变换功能或插件来支持这种需求。然而,对于复杂的坐标变换任务,特别是涉及地理坐标和投影坐标的变换,通常建议使用专业的GIS软件或数据分析软件进行处理。
此外,坐标变换还可能受到数据精度、坐标系统差异、地球曲率等多种因素的影响。因此,在进行坐标变换时,需要充分考虑这些因素,并采取相应的措施来确保变换的准确性和可靠性。
综上所述,从Origin坐标系到Map坐标系的变换是一个复杂的过程,需要明确坐标系统的定义、选择合适的变换方法、使用专业的软件工具进行执行,并对变换结果进行验证。
以上为生成回答,仅供参考~
-
-
@小伊 是否可以通过origin参数逆解map坐标系原点,它是否就是图中红点标注的位置?
-
关于“是否可以通过origin参数逆解map坐标系原点,以及它是否就是图中红点标注的位置”的问题,涉及到了坐标系的转换与解析,以及图形标注的理解。以下是对这两个问题的分析:
一、是否可以通过origin参数逆解map坐标系原点?
在数据处理和图形绘制软件Origin中,“origin”通常指的是坐标系的原点,即坐标(0,0)的位置。然而,“逆解map坐标系原点”这一表述可能涉及到了具体的坐标系转换或映射问题,这在不同的上下文和应用程序中可能有不同的含义。
一般来说,如果有一个明确的映射关系或转换公式,那么理论上是有可能通过已知的origin参数(即原点坐标)来逆解出某个特定坐标系(如map坐标系)的原点的。但是,这需要具体的数学模型或算法支持,并且依赖于映射关系的复杂性和准确性。
在Origin软件中,虽然提供了丰富的坐标系设置和转换功能,但直接通过origin参数逆解map坐标系原点的功能可能并不直接存在。这通常需要用户根据具体的科研或工程需求,结合Origin提供的工具和函数来手动实现。
二、map坐标系原点是否就是图中红点标注的位置?
这个问题同样依赖于具体的上下文和应用程序。在一般的图形绘制中,红点标注通常用于突出显示某个特定的数据点或位置。然而,这并不意味着红点标注的位置就是坐标系的原点。
在Origin软件中,用户可以根据需要自由地在图形中添加标注,包括红点标注。这些标注的位置是由用户手动设置的,与坐标系的原点没有必然的联系。因此,不能简单地将map坐标系原点等同于图中红点标注的位置。
综上所述,关于“是否可以通过origin参数逆解map坐标系原点,以及它是否就是图中红点标注的位置”的问题,答案取决于具体的上下文和应用程序。在一般情况下,这两个问题的答案都是否定的。如果需要实现类似的功能,可能需要结合具体的数学模型、算法和Origin提供的工具来手动实现。
以上为生成回答,仅供参考~