雷达启动问题
-
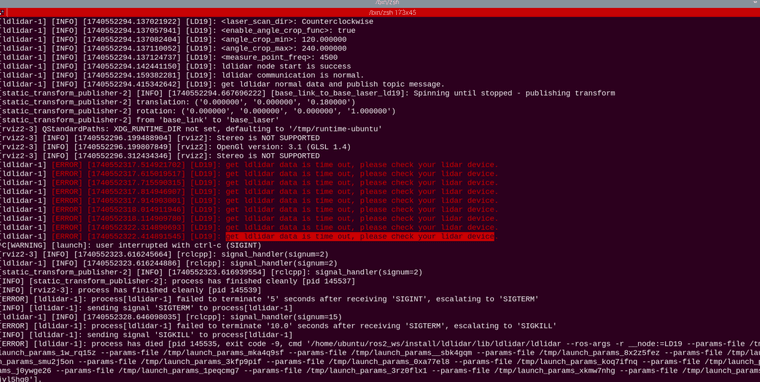
雷达节点正常启动,但是启动之后便会出现雷达超时的情况,不知道为什么?
-
雷达启动后出现雷达超时的情况,可能由多种因素导致。以下是一些可能的原因及相应的解决策略:
原因分析
-
传感器故障:
- 雷达传感器可能因撞击、磨损、质量问题或老化等原因而损坏,导致无法正常读取环境信息。
-
环境因素:
- 清洁区域存在高度差异、光线较弱、存在遮挡物或电磁干扰等,都可能导致雷达信号受阻或失真,从而引发超时问题。
-
电源问题:
- 雷达系统的电源可能出现问题,如电源线松动、电源模块故障等,导致雷达无法正常工作。
-
软件或固件问题:
- 雷达系统的软件或固件可能存在bug或版本不兼容等问题,导致雷达在启动后无法正常工作。
-
连接问题:
- 雷达与其他设备(如控制器、计算机等)之间的连接可能出现问题,如连接线松动、接口损坏等。
解决策略
-
检查传感器:
- 仔细检查雷达传感器是否损坏,如有必要,更换新的传感器。
-
优化环境:
- 确保雷达工作环境的光线充足、无遮挡物,并远离电磁干扰源。
-
检查电源:
- 检查雷达系统的电源线是否连接紧密,电源模块是否正常工作。
-
更新软件或固件:
- 尝试更新雷达系统的软件或固件,以解决可能存在的bug或版本不兼容问题。
-
检查连接:
- 检查雷达与其他设备之间的连接是否牢固,如有必要,更换连接线或接口。
其他注意事项
- 定期维护:定期对雷达系统进行维护和保养,以确保其长期稳定运行。
- 专业检修:如果以上方法均无法解决问题,建议联系专业检修人员进行检查和维修。
综上所述,雷达超时问题可能由多种因素导致,需要根据具体情况进行排查和解决。在排查过程中,应仔细检查传感器、环境、电源、软件或固件以及连接等方面的问题,并采取相应的解决策略。
以上为生成回答,仅供参考~
-