在使用导航时开启riz2时出现tf错误,并且在rviz2中给出初始位置也无效
-
[component_container_isolated-1] [INFO] [1741781896.214450603] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-2] [INFO] [1741781896.335671876] [rviz2]: Message Filter dropping message: frame 'odom' at time 1916.996 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1741781896.527589917] [rviz2]: Message Filter dropping message: frame 'odom' at time 1917.196 for reason 'discarding message because the queue is full' -
您遇到的问题涉及到了几个关键的错误信息,这些错误通常与机器人操作系统(ROS 2)中的坐标变换(tf2)和RViz 2的配置有关。以下是一些可能的解决步骤和建议:
-
确保tf2树正确配置:
- 错误信息
Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist指出map坐标系在tf2树中不存在。这通常意味着您的定位(如SLAM或AMCL)或地图服务器(如map_server)没有正确运行或配置。 - 确保您有一个地图服务器在运行,并且它正在发布到
map坐标系。如果您使用的是如gmapping或hector_slam之类的SLAM包,它们应该能够生成并发布map坐标系。 - 检查您的
launch文件或composition文件,确保所有必要的节点都已正确启动,并且坐标系之间的变换关系正确设置。
- 错误信息
-
检查RViz 2中的固定框架(Fixed Frame):
- 在RViz 2中,确保您已经设置了正确的固定框架(通常在左下角的面板中设置)。如果您正在使用SLAM或定位,通常应该将其设置为
map或odom。 - 如果
map坐标系不存在,您可以尝试将固定框架设置为odom,前提是您的机器人有里程计信息(odometry)。
- 在RViz 2中,确保您已经设置了正确的固定框架(通常在左下角的面板中设置)。如果您正在使用SLAM或定位,通常应该将其设置为
-
检查消息队列:
- 错误信息
discarding message because the queue is full指出RViz 2的消息队列已满,这可能是因为RViz 2无法及时处理接收到的所有消息。 - 尝试减少RViz 2中的可视化元素,或者增加消息队列的大小(尽管这通常不是首选方法,因为它可能只是掩盖了根本问题)。
- 检查您的网络连接和计算机性能,确保它们能够处理ROS 2通信的负载。
- 错误信息
-
检查节点和服务的状态:
- 使用
ros2 node list和ros2 service list命令来检查所有相关节点和服务是否都在运行。 - 使用
ros2 topic list和ros2 topic echo <topic>来检查关键话题(如里程计、地图数据等)是否有数据发布。
- 使用
-
重新启动和重新配置:
- 有时简单地重新启动所有ROS 2节点和RViz 2可以解决临时的tf2问题。
- 确保您的所有配置文件(如YAML文件)都是最新的,并且没有语法错误。
通过上述步骤,您应该能够诊断并解决遇到的问题。如果问题仍然存在,可能需要更详细地检查您的ROS 2应用和节点的具体实现。
以上为生成回答,仅供参考~
-
-
@1661223315 我也出现了同样的问题!
-
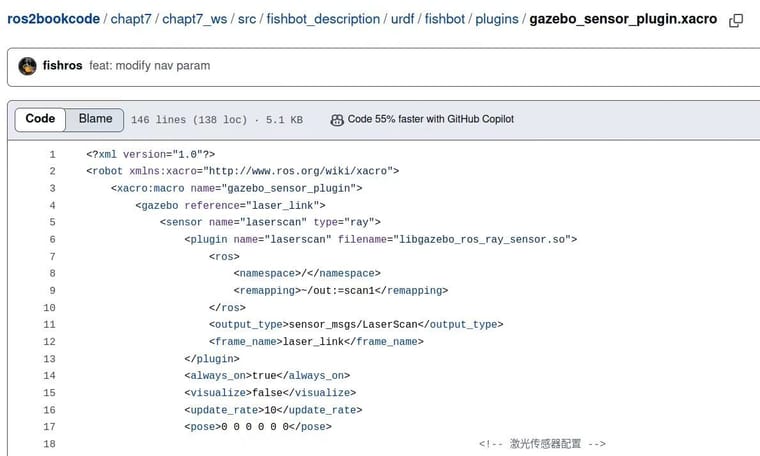
@1661223315 最后在b站评论区找到了,在第九行的scan1改成scan就解决了,本人是菜鸟,直接用的chapt7
-
-
此回复已被删除!