fishbot上有IMU模块,但是第九章最后的小车代码没有IMU部分,想知道这部分代码如何编写
-
@1257261547 cmd_vel 话题是否正常
-
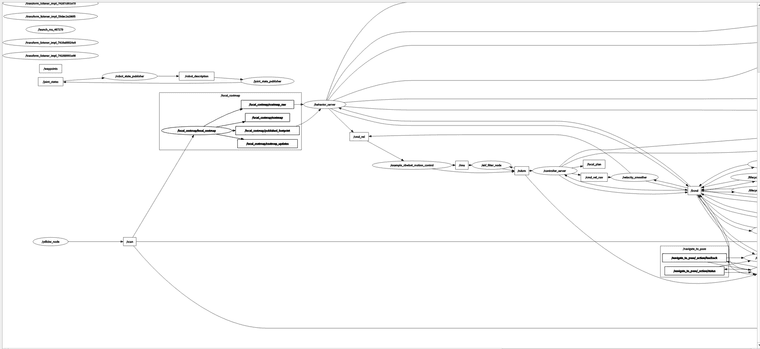
@小鱼 ros2 topic info /cmd_vel -v
Type: geometry_msgs/msg/TwistPublisher count: 6
Node name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.01.f8.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.01.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.0a.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.13.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.1e.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: velocity_smoother
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.69.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteSubscription count: 1
Node name: example_xbwbot_motion_control
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: SUBSCRIPTION
GID: 01.0f.ba.99.ac.26.9b.f6.00.00.00.00.00.00.01.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite -
@1257261547 但是使用ros2 topic echo /cmd_vel和ros2 topic hz /cmd_vel都没有回应
-
-
-
@1257261547bringup.launch.py ```
code_textimport launch_ros from ament_index_python.packages import get_package_share_directory from launch.launch_description_sources import PythonLaunchDescriptionSource def generate_launch_description(): fishbot_bringup_dir = get_package_share_directory( 'xbwbot_bringup') ydlidar_ros2_dir = get_package_share_directory( 'ydlidar') urdf2tf = launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [fishbot_bringup_dir, '/launch', '/urdf2tf.launch.py']), ) microros_agent = launch_ros.actions.Node( package='micro_ros_agent', executable='micro_ros_agent', arguments=['udp4','--port','8888'], output='screen' ) ros_serail2wifi = launch_ros.actions.Node( package='ros_serail2wifi', executable='tcp_server', parameters=[{'serial_port': '/tmp/tty_laser'}], output='screen' ) ydlidar = launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [ydlidar_ros2_dir, '/launch', '/ydlidar_launch.py']), ) # 使用 TimerAction 启动后 5 秒执行 ydlidar 节点 ydlidar_delay = launch.actions.TimerAction(period=5.0, actions=[ydlidar]) return launch.LaunchDescription([ urdf2tf, microros_agent, ros_serail2wifi, ydlidar_delay ]) odom2tf.cppcode_text
#include <rclcpp/rclcpp.hpp> #include <tf2/utils.h> #include <tf2_ros/transform_broadcaster.h> #include <geometry_msgs/msg/transform_stamped.hpp> #include <nav_msgs/msg/odometry.hpp> class OdomTopic2TF : public rclcpp::Node { public: OdomTopic2TF(std::string name) : Node(name) { // 创建 odom 话题订阅者,使用传感器数据的 Qos odom_subscribe_ = this->create_subscription<nav_msgs::msg::Odometry>( "odom", rclcpp::SensorDataQoS(), std::bind(&OdomTopic2TF::odom_callback_, this, std::placeholders::_1)); // 创建一个tf2_ros::TransformBroadcaster用于广播坐标变换 tf_broadcaster_ = std::make_unique<tf2_ros::TransformBroadcaster>(this); } private: rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr odom_subscribe_; std::unique_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_; // 回调函数,处理接收到的odom消息,并发布tf void odom_callback_(const nav_msgs::msg::Odometry::SharedPtr msg) { geometry_msgs::msg::TransformStamped transform; transform.header = msg->header; // 使用消息的时间戳和框架ID transform.child_frame_id = msg->child_frame_id; transform.transform.translation.x = msg->pose.pose.position.x; transform.transform.translation.y = msg->pose.pose.position.y; transform.transform.translation.z = msg->pose.pose.position.z; transform.transform.rotation.x = msg->pose.pose.orientation.x; transform.transform.rotation.y = msg->pose.pose.orientation.y; transform.transform.rotation.z = msg->pose.pose.orientation.z; transform.transform.rotation.w = msg->pose.pose.orientation.w; // 广播坐标变换信息 tf_broadcaster_->sendTransform(transform); }; }; int main(int argc, char **argv) { rclcpp::init(argc, argv); auto node = std::make_shared<OdomTopic2TF>("odom2tf"); rclcpp::spin(node); rclcpp::shutdown(); return 0; } navigation2.launch.pycode_text
import launch import launch_ros from ament_index_python.packages import get_package_share_directory from launch.launch_description_sources import PythonLaunchDescriptionSource def generate_launch_description(): # 获取与拼接默认路径 fishbot_navigation2_dir = get_package_share_directory( 'xbwbot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') rviz_config_dir = os.path.join( nav2_bringup_dir, 'rviz', 'nav2_default_view.rviz') # 创建 Launch 配置 use_sim_time = launch.substitutions.LaunchConfiguration( 'use_sim_time', default='true') map_yaml_path = launch.substitutions.LaunchConfiguration( 'map', default=os.path.join(fishbot_navigation2_dir, 'maps', 'room.yaml')) nav2_param_path = launch.substitutions.LaunchConfiguration( 'params_file', default=os.path.join(fishbot_navigation2_dir, 'config', 'nav2_params.yaml')) return launch.LaunchDescription([ # 声明新的 Launch 参数 launch.actions.DeclareLaunchArgument('use_sim_time', default_value=use_sim_time, description='Use simulation (Gazebo) clock if true'), launch.actions.DeclareLaunchArgument('map', default_value=map_yaml_path, description='Full path to map file to load'), launch.actions.DeclareLaunchArgument('params_file', default_value=nav2_param_path, description='Full path to param file to load'), launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [nav2_bringup_dir, '/launch', '/bringup_launch.py']), # 使用 Launch 参数替换原有参数 launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ), launch_ros.actions.Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen'), ]) odom_ekf.launch.pycode_text
import launch import launch_ros def generate_launch_description(): package_name = 'xbwbot_navigation2' ld = launch.LaunchDescription() pkg_share = launch_ros.substitutions.FindPackageShare(package=package_name).find(package_name) robot_localization_node = launch_ros.actions.Node( package='robot_localization', executable='ekf_node', name='ekf_filter_node', output='screen', parameters=[os.path.join(pkg_share, 'config/ekf.yaml'), {'use_sim_time': launch.substitutions.LaunchConfiguration('use_sim_time')}], remappings=[('odometry/filtered', 'odom')], ) ld.add_action(launch.actions.DeclareLaunchArgument(name='use_sim_time', default_value='True', description='Flag to enable use_sim_time')) ld.add_action(robot_localization_node) return ld -
@1257261547 这个是电脑的发布的话题,不是小车发的,这样查不对
-
@1257261547 你先切回不融合的导航,判断一下小车这边有没有问题
-
@小鱼
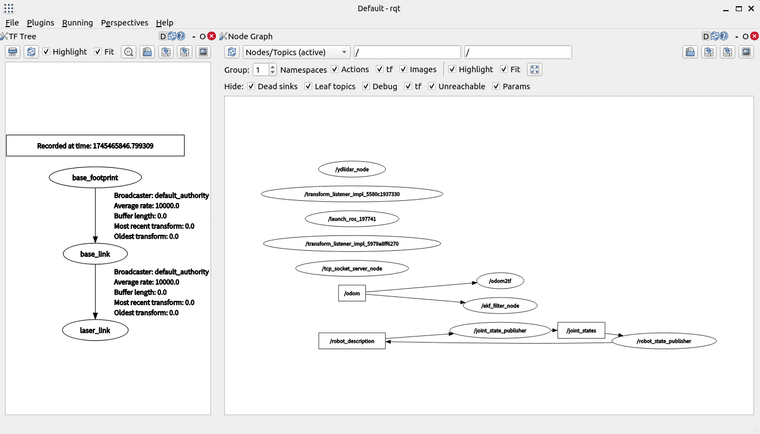
启动bringup.launch.py后rqt图像,导航也不能正常运行 -
code_text main.cpp #include <Arduino.h> #include <Esp32PcntEncoder.h> #include <Esp32McpwmMotor.h> #include <PidController.h> #include <Kinematics.h> #include <Warning.h> #include <ImuDriver.h> #include <WiFi.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <geometry_msgs/msg/twist.h> #include <nav_msgs/msg/odometry.h> #include <micro_ros_utilities/string_utilities.h> #include <sensor_msgs/msg/imu.h> rcl_allocator_t allocator; rclc_support_t support; rclc_executor_t executor; rcl_node_t node; rcl_subscription_t sub_cmd_vel; geometry_msgs__msg__Twist msg_cmd_vel; rcl_publisher_t pub_odom; nav_msgs__msg__Odometry msg_odom; rcl_timer_t timer; rcl_publisher_t pub_imu; sensor_msgs__msg__Imu msg_imu; Esp32PcntEncoder encoders[2]; // 创建一个数组用于存储两个编码器 Esp32McpwmMotor motor; // 创建一个名为motor的对象,用于控制电机 PidController pid_controller[2]; Kinematics kinematics; MPU6050 mpu(Wire); // 初始化MPU6050对象 ImuDriver imu(mpu); // 初始化Imu对象 imu_t imu_data; // IMU 数据对象 float target_linear_speed = 20.0; // 单位 毫米每秒 float target_angular_speed = 0.1; // 单位 弧度每秒 float out_left_speed = 0.0; // 输出的左右轮速度,不是反馈的左右轮速度 float out_right_speed = 0.0; void start() { pinMode(TRIG, OUTPUT); pinMode(ECHO, INPUT); pinMode(WARN, OUTPUT); } void timer_callback(rcl_timer_t* timer,int64_t last_call_time) { odom_t odom = kinematics.get_odom(); int64_t stamp = rmw_uros_epoch_millis(); msg_odom.header.stamp.sec = static_cast<int32_t>(stamp/1000); msg_odom.header.stamp.nanosec = static_cast<int32_t>((stamp%1000)*1e6); msg_odom.pose.pose.position.x = odom.x; msg_odom.pose.pose.position.y = odom.y; msg_odom.pose.pose.orientation.w = cos(odom.angle*0.5); msg_odom.pose.pose.orientation.x = 0; msg_odom.pose.pose.orientation.y = 0; msg_odom.pose.pose.orientation.z = sin(odom.angle*0.5); msg_odom.twist.twist.linear.x = odom.linear_speed; msg_odom.twist.twist.angular.z = odom.angular_speed; imu.getImuDriverData(imu_data); msg_imu.header.stamp.sec = static_cast<int32_t>(stamp / 1000); // 秒部分 msg_imu.header.stamp.nanosec = static_cast<uint32_t>((stamp % 1000) * 1e6); // 纳秒部分 msg_imu.angular_velocity.x = imu_data.angular_velocity.x; msg_imu.angular_velocity.y = imu_data.angular_velocity.y; msg_imu.angular_velocity.z = imu_data.angular_velocity.z; msg_imu.linear_acceleration.x = imu_data.linear_acceleration.x; msg_imu.linear_acceleration.y = imu_data.linear_acceleration.y; msg_imu.linear_acceleration.z = imu_data.linear_acceleration.z; msg_imu.orientation.x = imu_data.orientation.x; msg_imu.orientation.y = imu_data.orientation.y; msg_imu.orientation.z = imu_data.orientation.z; msg_imu.orientation.w = imu_data.orientation.w; if(rcl_publish(&pub_odom,&msg_odom,NULL)!=RCL_RET_OK) { Serial.printf("error: odom pub failed!"); } if(rcl_publish(&pub_imu, &msg_imu, NULL)!=RCL_RET_OK) { Serial.printf("error: imu pub failed!"); } } void twist_callback(const void * msg_in) { const geometry_msgs__msg__Twist* msg = (const geometry_msgs__msg__Twist*)msg_in; target_linear_speed = msg->linear.x*1000; target_angular_speed = msg->angular.z; kinematics.kinematics_inverse(target_linear_speed, target_angular_speed, &out_left_speed, &out_right_speed); Serial.printf("OUT:left_speed=%f,right_speed=%f\n", out_left_speed, out_right_speed); pid_controller[0].update_target(out_left_speed); pid_controller[1].update_target(out_right_speed); } void microros_task(void* args) { IPAddress agent_ip; agent_ip.fromString("192.168.188.93"); set_microros_wifi_transports("xbw_mi","Xbw159357",agent_ip,8888); delay(2000); allocator = rcl_get_default_allocator(); rclc_support_init(&support,0,NULL,&allocator); rclc_node_init_default(&node,"example_xbwbot_motion_control","",&support); unsigned int num_handles = 3; rclc_executor_init(&executor,&support.context,num_handles,&allocator); rclc_subscription_init_best_effort(&sub_cmd_vel,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(geometry_msgs,msg,Twist),"/cmd_vel"); rclc_executor_add_subscription(&executor,&sub_cmd_vel,&msg_cmd_vel,&twist_callback,ON_NEW_DATA); msg_odom.header.frame_id = micro_ros_string_utilities_set(msg_odom.header.frame_id,"odom"); msg_odom.child_frame_id = micro_ros_string_utilities_set(msg_odom.child_frame_id,"base_footprint"); msg_imu.header.frame_id = micro_ros_string_utilities_set(msg_imu.header.frame_id,"imu"); rclc_publisher_init_best_effort(&pub_odom,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(nav_msgs,msg,Odometry),"/odom"); rclc_publisher_init_best_effort(&pub_imu,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(sensor_msgs, msg, Imu),"/imu"); rclc_timer_init_default(&timer,&support,RCL_MS_TO_NS(50),timer_callback); rclc_executor_add_timer(&executor,&timer); while(!rmw_uros_epoch_synchronized()) { rmw_uros_sync_session(1000); delay(10); } rclc_executor_spin(&executor); } // v=wr r = v/w void setup() { // 初始化串口 Serial.begin(115200); // 初始化串口通信,设置通信速率为115200 // 初始化电机驱动器2 encoders[0].init(0, 32, 33); // 初始化第一个编码器,使用GPIO 32和33连接 encoders[1].init(1, 26, 25); // 初始化第二个编码器,使用GPIO 26和25连接 // 初始化PID控制器的参数 pid_controller[0].update_pid(0.625, 0.125, 0.0); pid_controller[1].update_pid(0.625, 0.125, 0.0); pid_controller[0].out_limit(-100, 100); pid_controller[1].out_limit(-100, 100); // 初始化运动学参数 kinematics.set_wheel_distance(175); // mm kinematics.set_motor_param(0, 0.103657); kinematics.set_motor_param(1, 0.103657); // 测试下运动学逆解 xTaskCreate(microros_task,"microros_task",10240,NULL,1,NULL); start(); imu.begin(18, 19); } void loop() { digitalWrite(TRIG, HIGH); delayMicroseconds(10); digitalWrite(TRIG, LOW); double delta_time = pulseIn(ECHO, HIGH); float detect_distance = delta_time * 0.0343 / 2; if(detect_distance<50) { digitalWrite(WARN,HIGH); } else { digitalWrite(WARN,LOW); } delayMicroseconds(9990); kinematics.update_motor_speed(millis(), encoders[0].getTicks(), encoders[1].getTicks()); motor.updateMotorSpeed(0, pid_controller[0].update(kinematics.get_motor_speed(0))); motor.updateMotorSpeed(1, pid_controller[1].update(kinematics.get_motor_speed(1))); // Serial.printf("speed1=%d,speed2=%d\n",kinematics.get_motor_speed(0),kinematics.get_motor_speed(1)); // Serial.printf("x,y,yaw=%f,%f,%f\n",kinematics.get_odom().x,kinematics.get_odom().y,kinematics.get_odom().angle); imu.update(); }我使用的main.cpp,PidController.h和PidController.h与第九章的代码相同,ImuDriver.h和.cpp是从https://github.dev/fishros/fishbot_motion_control_microros复制过来的。