fishbot 烧录程序后用Agent没法识别到串口
-
@1326172855 哪几个?贴出来
-
@小鱼
platform = espressif32
board = fishbot_motion_control_four_driver_v2
framework = arduinolib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
这个是ini的
#include <Arduino.h>
#include <Esp32McpwmMotor.h>
#include <Esp32PcntEncoder.h>#include <micro_ros_platformio.h>
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>rcl_allocator_t allocator;
rclc_support_t support;
rcl_node_t node;
rclc_executor_t executor;//node set// setup 函数,启动时调用一次
void setup()
{
Serial.begin(115200); // 设置串口波特率// 设置通过串口进行MicroROS通信
set_microros_serial_transports(Serial);
// 延时时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 hello_microros
rclc_node_init_default(&node, "hello_microros", "", &support);
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);}
// loop 函数,setup 后会被重复调用
void loop()
{// 延时函数,单位 ms delay(100);// 循环处理数据
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
这个是main.cpp里面的 -
@1326172855 下载的串口是哪个串口
-
@小鱼 ttyUSB0
-
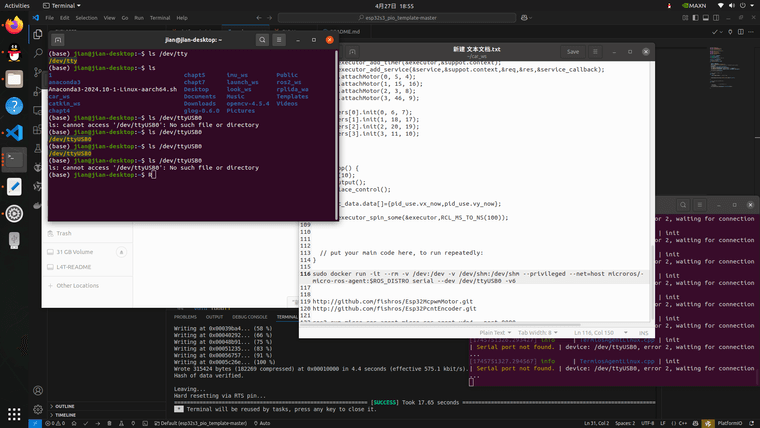
@1326172855 ls /dev/ttyUSB* 看一下 lsusb 再看一下
-
@小鱼 /dev/ttyUSB0它显示是
-
没复位之前它是
info | TermiosAgentLinux.cpp | init | running... | fd: 3
[1745729780.407258] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 6
然后复位之后就
Serial port not found -
@小鱼 我发现这个ESP32开发板只有烧录状态或者长按复位键的时候电脑才识别的到ch340,而在其他状态下识别不到
-
@小鱼
 我发现这个ESP32开发板只有烧录状态或者长按复位键的时候电脑才识别的到ch340,而在其他状态下识别不到
我发现这个ESP32开发板只有烧录状态或者长按复位键的时候电脑才识别的到ch340,而在其他状态下识别不到 -
@1326172855 有没有打开电池开关