使用树莓派建图的时候找不到map
-
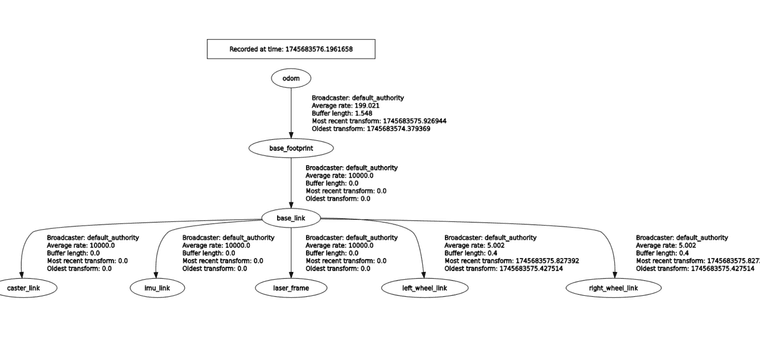 tf是这个样子,但是没有找到map到odom的,然后我使用topic,发现是存在/map的,如下所示,
tf是这个样子,但是没有找到map到odom的,然后我使用topic,发现是存在/map的,如下所示,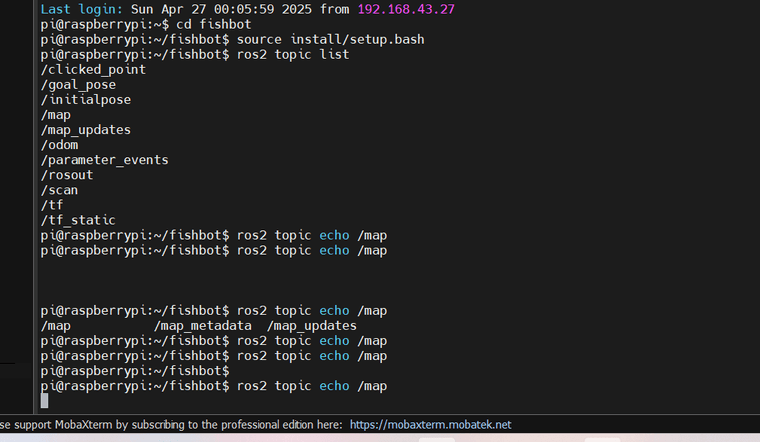 然后我使用ros2 topic echo /map
然后我使用ros2 topic echo /map
然后卡在这里就不动了,鱼哥,这个应该怎么解决呢? -
@1117 启动slam了吗
-
@小鱼 ros2 launch slam_toolbox online_async_launch.py use_sim_time:=False鱼哥,我使用了这个
-
@小鱼
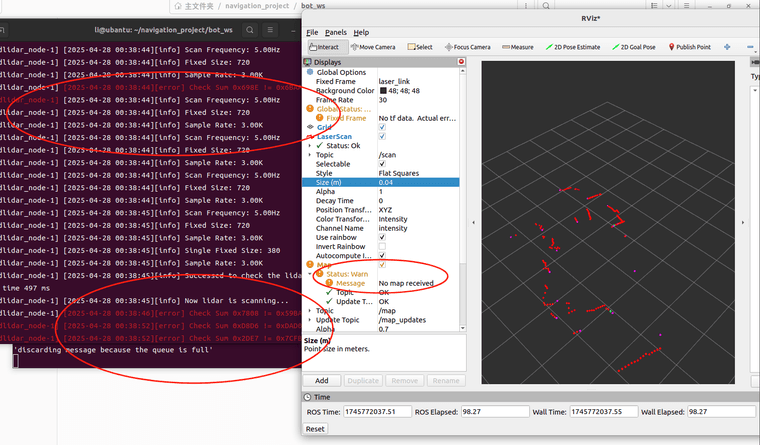 鱼哥,然后我这个map还是找不到,然后我单独驱动雷达,显示是有scan话题,但是我用lauch启动的时候就全是错,连雷达都扫描不了了,我的py如下:
鱼哥,然后我这个map还是找不到,然后我单独驱动雷达,显示是有scan话题,但是我用lauch启动的时候就全是错,连雷达都扫描不了了,我的py如下:
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
from launch.launch_description_sources import PythonLaunchDescriptionSourcedef generate_launch_description():
bringup_dir = get_package_share_directory(
'bringup')
ydlidar_ros2_dir = get_package_share_directory(
'ydlidar')urdf2tf = launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [bringup_dir, '/launch', '/urdf2tf.launch.py']), ) odom2tf = launch_ros.actions.Node( package='bringup', executable='odom2tf', output='screen' ) microros_agent = launch_ros.actions.Node( package='micro_ros_agent', executable='micro_ros_agent', arguments=[ 'serial', # 切换为串口模式 '-b', '115200', # 波特率参数(需字符串类型) '--dev', '/dev/ttyUSB0', # 设备路径 '-v6' # 日志详细级别 ], output='screen' # 保持终端输出可见 ) ydlidar = launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [ydlidar_ros2_dir, '/launch', '/ydlidar_launch.py']), ) # 使用 TimerAction 启动后 5 秒执行 ydlidar 节点 ydlidar_delay = launch.actions.TimerAction(period=5.0, actions=[ydlidar]) return launch.LaunchDescription([ urdf2tf, odom2tf, microros_agent, ydlidar_delay ]),鱼哥,遮该怎么解决呢?我查看qos好像都是best_effort,我应该如何解决这些问题呢?(我没有路由器,网络存在问题,使用的是树莓派4B,然后,运行拓展3的启动时候,然后使用slam_too;box的那条指令,也不会有map信息,鱼哥,求助!
-
@1117 里程计话题是否正常
-
@1117 slam_toolbox 有没有报错,日志提供一下