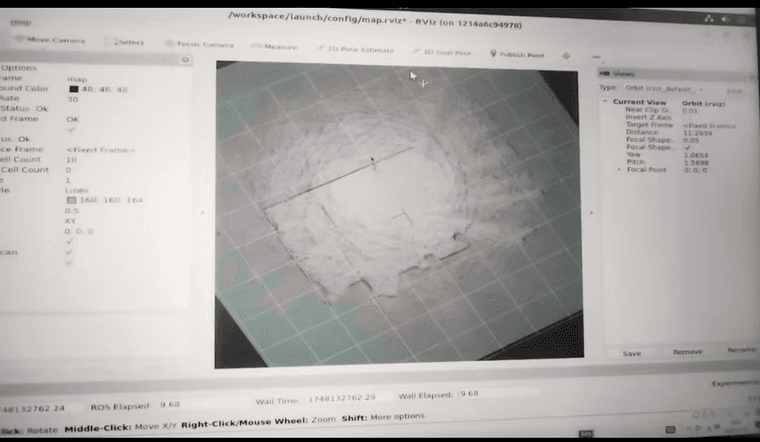
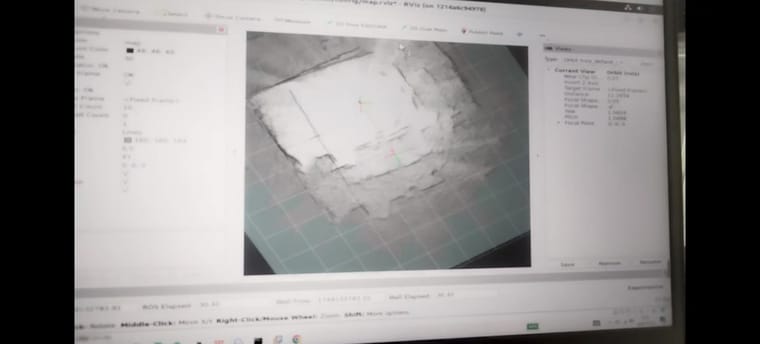
建图时,代表小车(或者雷达)位置的坐标轴突然飘走
-
局域网,2.4G ,双频合一关闭,网络延迟4ms以内,开始建图时正常,建图结果能看到房间轮廓,几秒钟后,代表雷达或者小车的坐标轴突然飘走,(此时小车是静止的)。建图结果看不出房间轮廓,失败。 另一种情况是rviz中代表小车的坐标轴突然转个方向(此时小车是静止的),地图突然换个方向,建图结果看不出房间轮廓,建图失败。
-
@83454211-0 用的哪款雷达
-
@83454211-0 雷达驱动的终端日志提供一下
-
@小鱼 cyf@cyf-vm:~/Desktop$ ^C
cyf@cyf-vm:~/Desktop$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
[sudo] password for cyf:
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-26-13-31-09-404105-05fbc5873afd-58
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [59]
[ydlidar_tcp_node-1] [INFO] [1748266272.296373182] [ydlidar_node]: 等待激光雷达TCP连接: 0.0.0.0:8888
[ydlidar_tcp_node-1] [INFO] [1748266272.532116829] [ydlidar_node]: 激光雷达已连接: ('192.168.1.11', 56625)
[ydlidar_tcp_node-1] [INFO] [1748266272.547755624] [ydlidar_node]: 雷达X2数据校验正确,开始解析数据
[ydlidar_tcp_node-1] [INFO] [1748266275.612581642] [ydlidar_node]: /scan话题平均发布速率: 7.13 Hz
[ydlidar_tcp_node-1] [INFO] [1748266278.706917788] [ydlidar_node]: /scan话题平均发布速率: 7.11 Hz
[ydlidar_tcp_node-1] [INFO] [1748266281.803216795] [ydlidar_node]: /scan话题平均发布速率: 7.11 Hz
[ydlidar_tcp_node-1] [INFO] [1748266284.8893
26395] [ydlidar_node]: /scan话题平均发布速率: 7.13 Hz
[ydlidar_tcp_node-1] [INFO] [1748266287.989197137] [ydlidar_node]: /scan话题平均发布速率: 7.11 Hz
[ydlidar_tcp_node-1] [INFO] [1748266291.064862653] [ydlidar_node]: /scan话题平均发布速率: 7.14 Hz
[ydlidar_tcp_node-1] [INFO] [1748266294.151911245] [ydlidar_node]: /scan话题平均发布速率: 7.13 Hz
[ydlidar_tcp_node-1] [INFO] [1748266297.243561051] [ydlidar_node]: /scan话题平均发布速率: 7.12 Hz
[ydlidar_tcp_node-1] [INFO] [1748266300.336556951] [ydlidar_node]: /scan话题平均发布速率: 7.10 Hz
-
@小鱼 库存新雷达
-
@小鱼 是上面的雷达日志吗?
-
@83454211 是的,加我微信吧,抽空远程后给你看看