cartographer 如何配置倾斜的3d雷达和imu
-
雷达自带imu,机器人自身也有配imu,当前雷达是倾斜放置的,为了有一定高度同时探测地面低矮的障碍物,尝试了一些配置,有以下问题
1:如果tracking_frame配置为base_link,会报错,要求imu的frame id和base_link不能离太远,3d建图配置里没找到哪里可以禁用imu
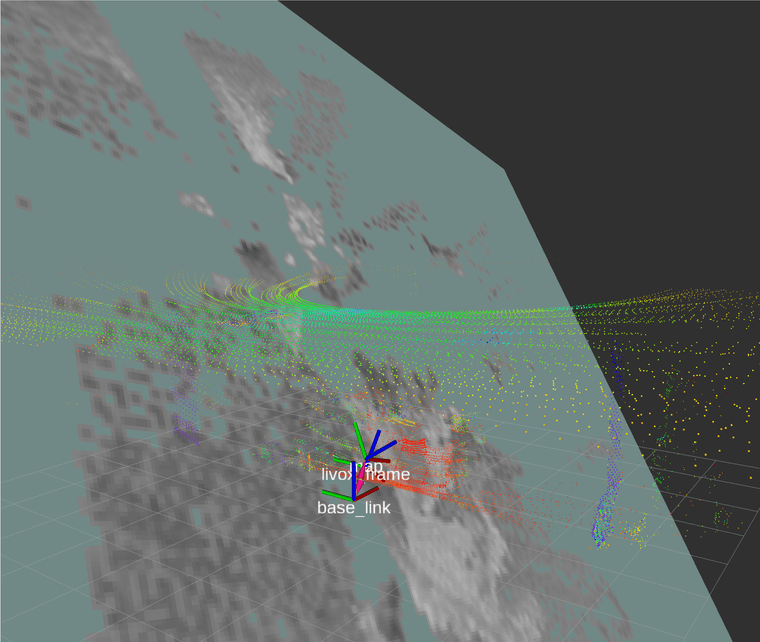
2:如果tracking_frame配置为imu的frame id,则rviz中map会倾斜,导致地图都是灰色或黑色两个imu都没有和base_link重合
-
-
-- Copyright 2016 The Cartographer Authors
-- Licensed under the Apache License, Version 2.0 (the "License");
-- you may not use this file except in compliance with the License.
-- You may obtain a copy of the License at-- http://www.apache.org/licenses/LICENSE-2.0
-- Unless required by applicable law or agreed to in writing, software
-- distributed under the License is distributed on an "AS IS" BASIS,
-- WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-- See the License for the specific language governing permissions and
-- limitations under the License.include "map_builder.lua"
include "trajectory_builder.lua"options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "livox_frame",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 1
TRAJECTORY_BUILDER_3D.min_range = 0.2
TRAJECTORY_BUILDER_3D.max_range = 20.
TRAJECTORY_BUILDER_2D.min_z = 0.1
TRAJECTORY_BUILDER_2D.max_z = 1.0
TRAJECTORY_BUILDER_3D.use_online_correlative_scan_matching = falseMAP_BUILDER.use_trajectory_builder_3d = true
MAP_BUILDER.num_background_threads = 4
POSE_GRAPH.optimization_problem.huber_scale = 5e2
POSE_GRAPH.optimize_every_n_nodes = 40
POSE_GRAPH.constraint_builder.sampling_ratio = 0.03
POSE_GRAPH.optimization_problem.ceres_solver_options.max_num_iterations = 20
POSE_GRAPH.constraint_builder.min_score = 0.5
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.55POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e3
POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e3return options
-
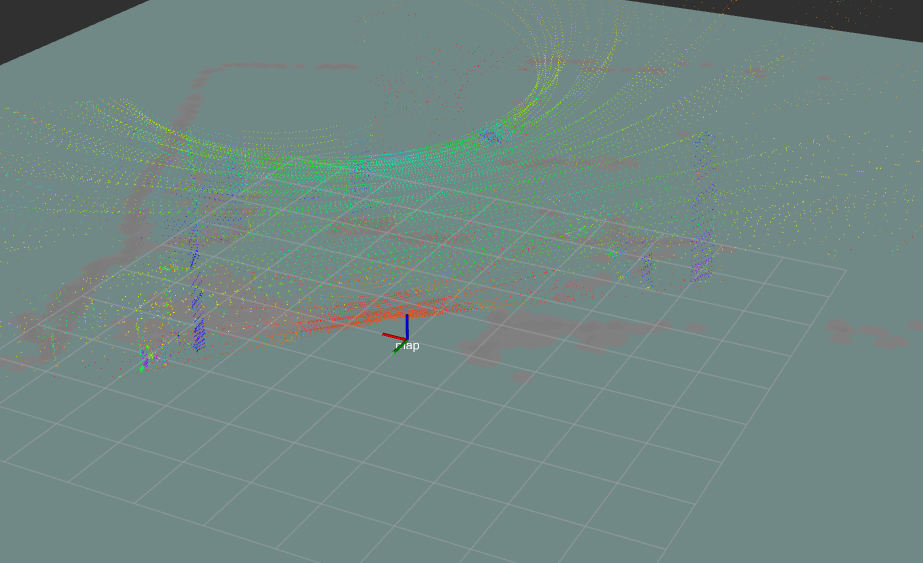
当使用水平的imu时,tracking_frame改为水平imu的frameid,map是水平的了,但是点云会穿透map,整个地图都会变成灰色或黑色,无法有效建图 -
用pcl把点云转到base_link坐标系下,使用passthrough过滤掉z轴0.05一下的数据即可