Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
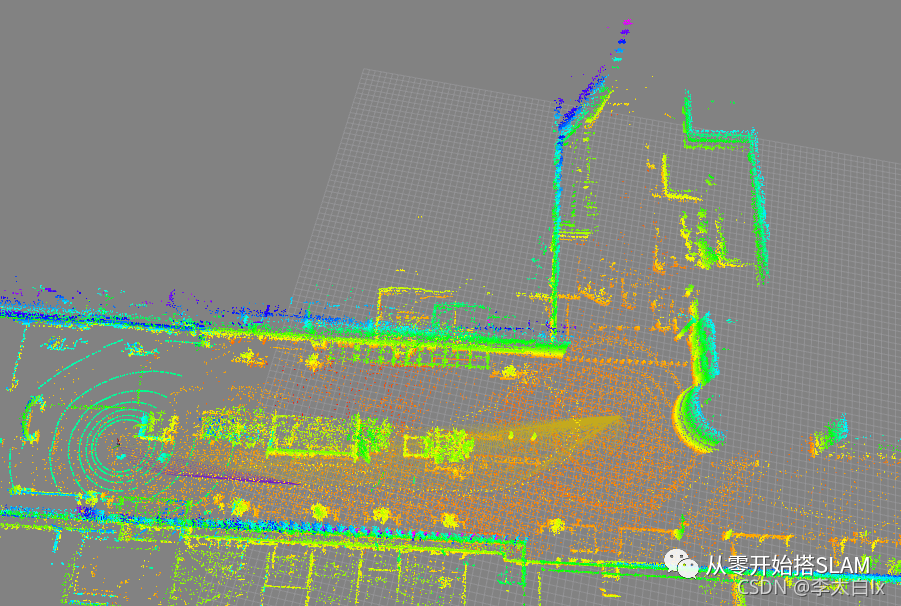
在ros1(Noetic)中要如何使用Cartographer只根据激光雷达的点云数据建立3D图? 我目前使用的激光雷达是速腾16线激光雷达,可以读出数据,但是要怎么配置Cartographer才能进行3D建图,期望大概是下面这种效果