求助--底盘控制板代码谁能帮忙改一下?
-
底盘用键盘控制能动了,控制话题/cmd_vel 速度话题/raw_vel,雷达能提供数据了,话题/scan,怎样把他们组成一个有机的整体呢,现在只是一堆零件安装在了一起,需要修改代码
-
控制板实物图
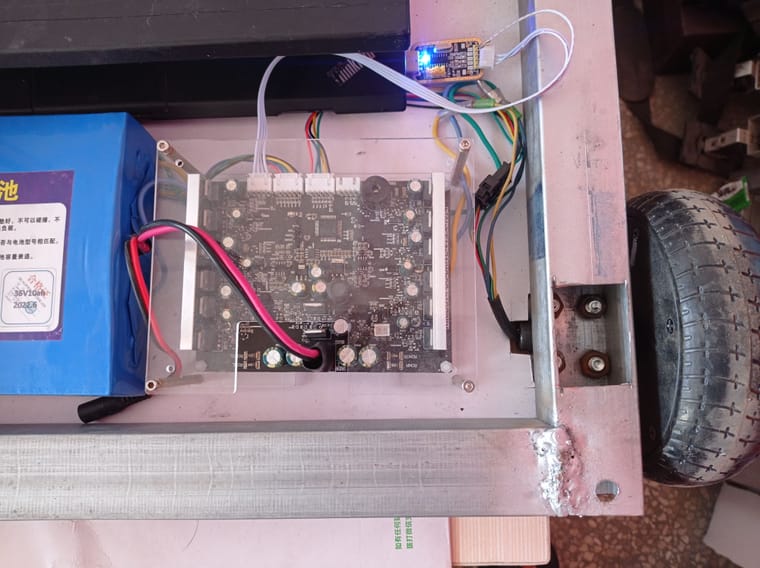
此控制板提供2个话题:
速度话题/raw_vel 是实时的线速度和角速度,需要转换成odom话题,懂得帮忙给改一下
控制话题/cmd_vel 通过键盘控制节点可以前后左右移动这是标准的ros2控制话题,不用改。底盘控制板代码目录结构
CMakeLists.txt
cmake_minimum_required(VERSION 3.5) project(rikibot_foc_driver) #Default to C++14 if(NOT CMAKE_CXX_STANDARD) set(CMAKE_CXX_STANDARD 14) endif() if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") add_compile_options(-Wall -Wextra -Wpedantic) endif() include_directories(include ${Boost_INCLUDE_DIRS}) find_package(ament_cmake REQUIRED) find_package(rclcpp REQUIRED) find_package(std_msgs REQUIRED) find_package(geometry_msgs REQUIRED) find_package(nav_msgs REQUIRED) find_package(tf2 REQUIRED) find_package(riki_msgs REQUIRED) find_package(serial REQUIRED) find_package(tf2_ros REQUIRED) find_package(Boost REQUIRED COMPONENTS system filesystem thread program_options) add_executable(rikibot_foc_driver src/rikibot_foc_driver.cpp) target_link_libraries(rikibot_foc_driver ${Boost_LIBRARIES}) ament_target_dependencies(rikibot_foc_driver rclcpp geometry_msgs nav_msgs tf2 tf2_ros std_msgs serial riki_msgs) install(TARGETS rikibot_foc_driver DESTINATION lib/${PROJECT_NAME}) install( DIRECTORY include/ DESTINATION include) install( DIRECTORY launch DESTINATION share/${PROJECT_NAME}) ament_package()rikibot_foc_driver.h
#include <chrono> #include <memory> #include "rclcpp/rclcpp.hpp" #include "std_msgs/msg/string.hpp" #include <nav_msgs/msg/odometry.hpp> #include <geometry_msgs/msg/twist.hpp> //#include <tf/tf.h> #include <riki_msgs/msg/velocities.hpp> #include <geometry_msgs/msg/vector3.hpp> #include <std_msgs/msg/float32_multi_array.hpp> #include <riki_msgs/msg/imu.hpp> #include <riki_msgs/msg/battery.hpp> #include <string> #include <vector> #include <math.h> #include <serial/serial.h> #define constrain(amt,low,high) ((amt)<(low)?(low):((amt)>(high)?(high):(amt))) #define BATTERY_RATE 1 #define START_FRAME 0xABCD #define MAX_RPM 366 #define FOC_MAX_PWM 1000 #define WHEEL_DIAMETER 0.165 #define LR_WHEELS_DISTANCE 0.33 #define FR_WHEELS_DISTANCE 0.0 #define PI 3.1415926 typedef struct{ uint16_t start; //0XABCD int16_t rpmR; //右轮转速 int16_t rpmL; //左轮转速 int16_t batVoltage; //主板电压 int16_t boardTemp; //主板温度 int16_t curL_DC; //左电机电流 int16_t curR_DC; //右电机电流 uint16_t checksum; //校验和 } RikibotFeedback; typedef struct{ uint16_t start; int16_t mSpeedR; int16_t mSpeedL; uint16_t checksum; } RikibotCommand; typedef struct{ int motor1; int motor2; }MotorRPM; typedef struct { float linear_x; float linear_y; float angular_z; }Velocities; class RikibotFocDriver: public rclcpp::Node{ public: RikibotFocDriver(); ~RikibotFocDriver(); void loop(); private: rclcpp::TimerBase::SharedPtr topic_timer_; rclcpp::Publisher<riki_msgs::msg::Velocities>::SharedPtr raw_vel_pub_; rclcpp::Publisher<riki_msgs::msg::Battery>::SharedPtr battery_pub_; rclcpp::Subscription<geometry_msgs::msg::Twist>::SharedPtr velocity_sub_; bool ReadFormSerial(); void cmd_vel_callback(const geometry_msgs::msg::Twist::SharedPtr twist_msg); void RosNodeTopicCallback(); void SetVelocity(double x, double y, double angular_z); void calculateRPM(float linear_x, float linear_y, float angular_z); void getVelocities(int rpm1, int rpm2); int16_t map(int16_t x, int16_t in_min, int16_t in_max, int16_t out_min, int16_t out_max); void PublisherMotorVel(); void publisherBattery(); int max_rpm_; float wheel_diameter_; float wheels_x_distance_; float wheels_y_distance_; float wheel_circumference_; serial::Serial Robot_Serial; RikibotFeedback Feedback; RikibotCommand Command; Velocities vel; MotorRPM req_rpm; rclcpp::Time now_; riki_msgs::msg::Velocities raw_vel_msg; riki_msgs::msg::Battery raw_battery_msg; std::string port_name_; std::string rxdata; int baud_rate_; int control_rate_; };rikibot_foc_driver.launch.py
import os import launch import launch.actions import launch.substitutions import launch_ros.actions from ament_index_python.packages import get_package_share_directory def generate_launch_description(): launch_description = launch.LaunchDescription() launch_description.add_action( launch_ros.actions.Node( package='rikibot_foc_driver', node_executable='rikibot_foc_driver', name='rikibot_foc_driver', output='screen',) ) return launch_descriptionpackage.xml
<?xml version="1.0"?> <?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?> <package format="3"> <name>rikibot_foc_driver</name> <version>0.0.0</version> <description>TODO: Package description</description> <maintainer email="304050118@qq.com">rikibot</maintainer> <license>TODO: License declaration</license> <buildtool_depend>ament_cmake</buildtool_depend> <depend>rclcpp</depend> <depend>std_msgs</depend> <depend>std_srvs</depend> <depend>geometry_msgs</depend> <depend>nav_msgs</depend> <depend>riki_msgs</depend> <depend>tf2</depend> <depend>tf2_ros</depend> <test_depend>ament_lint_auto</test_depend> <test_depend>ament_lint_common</test_depend> <export> <build_type>ament_cmake</build_type> </export> </package>rikibot_foc_driver.cpp
//#include <chrono> //#include <memory> //#include "rclcpp/rclcpp.hpp" //#include "std_msgs/msg/string.hpp" #include "rikibot_foc_driver/rikibot_foc_driver.h" using namespace std::chrono_literals; RikibotFocDriver::RikibotFocDriver(): Node("rikibot_foc_driver") { wheel_diameter_ = WHEEL_DIAMETER; wheel_circumference_ = PI * wheel_diameter_; max_rpm_ = MAX_RPM; wheels_x_distance_ = FR_WHEELS_DISTANCE; wheels_y_distance_ = LR_WHEELS_DISTANCE; now_ = now(); declare_parameter("port_name", std::string("/dev/ttyTHS1")); get_parameter("port_name", port_name_); declare_parameter("baud_rate", 115200); get_parameter("baud_rate", baud_rate_); raw_vel_pub_ = this->create_publisher<riki_msgs::msg::Velocities>("raw_vel", 10); battery_pub_ = this->create_publisher<riki_msgs::msg::Battery>("battery", 10); topic_timer_ = this->create_wall_timer(10ms, std::bind(&RikibotFocDriver::RosNodeTopicCallback, this)); velocity_sub_ = this->create_subscription<geometry_msgs::msg::Twist>("cmd_vel", 10, std::bind(&RikibotFocDriver::cmd_vel_callback, this, std::placeholders::_1)); /**open serial device**/ try{ Robot_Serial.setPort(port_name_); Robot_Serial.setBaudrate(baud_rate_); serial::Timeout to = serial::Timeout::simpleTimeout(2000); Robot_Serial.setTimeout(to); Robot_Serial.open(); }catch (serial::IOException& e){ RCLCPP_INFO(this->get_logger(), "Rikibot Serial Unable to open port"); } if(Robot_Serial.isOpen()){ RCLCPP_INFO(this->get_logger(), "Rikibot Serial Port opened"); }else{ } } RikibotFocDriver::~RikibotFocDriver() { Robot_Serial.close(); } void RikibotFocDriver::RosNodeTopicCallback() { if (true == ReadFormSerial()){ PublisherMotorVel(); publisherBattery(); } //RCLCPP_INFO(this->get_logger(), "Hello from ROS2"); } bool RikibotFocDriver::ReadFormSerial() { if(Robot_Serial.available()){ rxdata = Robot_Serial.read(Robot_Serial.available()); if (rxdata.size()==sizeof(RikibotFeedback)){ memcpy(&Feedback, rxdata.c_str(), sizeof(RikibotFeedback)); uint16_t checksum = (uint16_t)(Feedback.start^Feedback.rpmR^Feedback.rpmL^Feedback.batVoltage^Feedback.boardTemp^Feedback.curL_DC^Feedback.curR_DC); if((Feedback.start == START_FRAME) && (checksum == Feedback.checksum)) return true; else return false; }else{ return false; } }else{ return false; } } /*cmd_vel Subscriber的回调函数*/ void RikibotFocDriver::cmd_vel_callback(const geometry_msgs::msg::Twist::SharedPtr twist_msg) { SetVelocity(twist_msg->linear.x, twist_msg->linear.y, twist_msg->angular.z); } /*底盘速度发送函数*/ void RikibotFocDriver::SetVelocity(double x, double y, double angular_z) { calculateRPM(x, y, angular_z); int16_t mSpeedL = map(req_rpm.motor1, -max_rpm_, max_rpm_, -FOC_MAX_PWM,FOC_MAX_PWM); int16_t mSpeedR = map(req_rpm.motor2, -max_rpm_, max_rpm_, -FOC_MAX_PWM,FOC_MAX_PWM); Command.start = (uint16_t)START_FRAME; Command.mSpeedR = (uint16_t)mSpeedR; Command.mSpeedL = (uint16_t)mSpeedL; //printf("left rpm: mSpeedL: %d, rrpm: %d\r\n", mSpeedL, mSpeedR); Command.checksum = (uint16_t)(Command.start^Command.mSpeedR^Command.mSpeedL); Robot_Serial.write((uint8_t *)&Command, sizeof(Command)); } void RikibotFocDriver::PublisherMotorVel() { getVelocities(Feedback.rpmL, Feedback.rpmR); raw_vel_msg.linear_x = vel.linear_x; raw_vel_msg.linear_y = 0; raw_vel_msg.angular_z = vel.angular_z; raw_vel_pub_->publish(raw_vel_msg); } void RikibotFocDriver::publisherBattery() { if((now() - now_).seconds() > 1/BATTERY_RATE){ raw_battery_msg.battery = (float)Feedback.batVoltage/100; if (raw_battery_msg.battery != 0){ battery_pub_->publish(raw_battery_msg); now_ = now(); } } } void RikibotFocDriver::calculateRPM(float linear_x, float linear_y, float angular_z) { float linear_vel_x_mins; float linear_vel_y_mins; float angular_vel_z_mins; float tangential_vel; float x_rpm; float y_rpm; float tan_rpm; //convert m/s to m/min linear_vel_x_mins = linear_x * 60; linear_vel_y_mins = linear_y * 60; //convert rad/s to rad/min angular_vel_z_mins = angular_z * 60; tangential_vel = angular_vel_z_mins * ((wheels_x_distance_ / 2) + (wheels_y_distance_ / 2)); x_rpm = linear_vel_x_mins / wheel_circumference_; y_rpm = linear_vel_y_mins / wheel_circumference_; tan_rpm = tangential_vel / wheel_circumference_; req_rpm.motor1 = int16_t(x_rpm - y_rpm - tan_rpm); req_rpm.motor1 = constrain(req_rpm.motor1, -max_rpm_, max_rpm_); //front-right motor req_rpm.motor2 = -int16_t(x_rpm + y_rpm + tan_rpm); req_rpm.motor2 = constrain(req_rpm.motor2, -max_rpm_, max_rpm_); } void RikibotFocDriver::getVelocities(int rpm1, int rpm2 ) { float average_rps_x; //float average_rps_y; float average_rps_a; //convert average revolutions per minute to revolutions per second average_rps_x = ((float)(rpm1 - rpm2) / 2) / 60; // RPM vel.linear_x = average_rps_x * wheel_circumference_; // m/s //convert average revolutions per minute in y axis to revolutions per second //average_rps_y = ((float)(-rpm1 + rpm2) / 2) / 60; // RPM vel.linear_y = 0; //convert average revolutions per minute to revolutions per second average_rps_a = ((float)(rpm1 + rpm2) / 2) / 60; vel.angular_z = -(average_rps_a * wheel_circumference_) / ((wheels_x_distance_ / 2) + (wheels_y_distance_ / 2)); // rad/s } int16_t RikibotFocDriver::map(int16_t x, int16_t in_min, int16_t in_max, int16_t out_min, int16_t out_max) { return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min; } int main(int argc, char * argv[]) { rclcpp::init(argc, argv); auto driver = std::make_shared<RikibotFocDriver>(); rclcpp::spin(driver); rclcpp::shutdown(); return 0; } -
@毛哥成山轮胎机油保养 在 求助--底盘控制板代码谁能帮忙改一下? 中说:
int16_t rpmR; //右轮转速
int16_t rpmL; //左轮转速如果有左右轮转速信息就可以积分得出里程计数据,可以参考代码