rosbag2 1.如何录制自定义接口的主题 2.play 录制好的数据报错 No metadata found and no storage_id specified. Can't open bag.
-
代码是鱼哥的代码 这里面传送消息的时候用的是Novel
结果报错找不到接口village_interfaces
报错
[WARN] [1660211017.040132784] [ROSBAG2_TRANSPORT]: Topic '/sexy_girl' has unknown type 'village_interfaces/msg/Novel' . Only topics with known type are supported. Reason: 'package 'village_interfaces' not found, searching: [/opt/ros/humble]于是换了常规接口测试
录是录下来了 但是报错打不开
ros2@ros2-virtual-machine:~/d2lros/rosbag2_2022_08_11-17_29_40$ ros2 bag play /home/ros2/d2lros/rosbag2_2022_08_11-17_29_40/rosbag2_2022_08_11-17_29_40_0.db3
No metadata found and no storage_id specified. Can't open bag.
#!/usr/bin/env python3! from rclpy.node import Node from std_msgs.msg import String,UInt32 #从村庄接口服务类中导入借钱服务 from village_interfaces.srv import BorrowMoney from sensor_msgs.msg import Image #从村庄接口话题消息类中导入小说消息类型! from village_interfaces.msg import Novel class Li4Node(Node): """ 创建一个李四节点,并在初始化时输出一个话 """ def __init__(self): super().__init__("li4") self.get_logger().info("大家好,我是李四,我是一名作家!") self.write = self.create_publisher(Novel,"sexy_girl", 10) timer_period = 5 #每5s写一章节话 self.timer = self.create_timer(timer_period, self.timer_callback) #启动一个定时装置,每 1 s,调用一次time_callback函数 self.i = 0 # i 是个计数器,用来算章节编号的 # 账户钱的数量 self.account = 80 # self.image = None # 开启收钱箱 self.sub_ = self.create_subscription(UInt32,"sexy_girl_money",self.recv_money_callback,10) # 新建借钱服务 self.borrow_server = self.create_service(BorrowMoney, "borrow_money", self.borrow_money_callback) # 声明参数,参数名字,默认值 self.declare_parameter("write_timer_period",5) # 开始获取图片 self.create_subscription(Image,"image",self.recv_image_callback,10) def borrow_money_callback(self,request, response): """ 借钱回调函数 参数:request 客户端请求 response: 服务端响应 返回值:response """ #根据李四借钱规则,借出去的钱不能多于自己所有钱的十分之一,不然就不借 self.get_logger().info("收到来自: %s 的借钱请求,目前账户内还有%d元" % (request.name, self.account)) if request.money <= int(self.account*0.1): response.success = True response.money = request.money self.account = self.account - request.money self.get_logger().info("借钱成功,借出%d 元 ,目前账户余额%d 元" % (response.money,self.account)) else: response.success = False response.money = 0 self.get_logger().info("对不起兄弟,手头紧,不能借给你") return response def timer_callback(self): msg = Novel() msg.content = '第%d回:潋滟湖 %d 次偶遇胡艳娘' % (self.i,self.i) msg.image = self.image self.write.publish(msg) #将小说内容发布出去 self.get_logger().info('李四:我发布了艳娘传奇:"%s"' % msg.content) #打印一下发布的数据,供我们看 self.get_logger().info('李四:为艳娘传奇配上了插图,长:%d,宽:%d' % (msg.image.height,msg.image.width)) #打印一下发布的插图尺寸,供我们看 self.i += 1 #章节编号+1 # 回调之后更新回调周期 timer_period = self.get_parameter('write_timer_period').get_parameter_value().integer_value # 更新回调周期 self.timer.timer_period_ns = timer_period * (1000*1000*1000) def recv_money_callback(self,money): self.account += money.data #self.get_logger().info('李四:我已经收到了%d的稿费' % self.account) def recv_image_callback(self,image): self.image = image def main(args=None): """ ros2运行该节点的入口函数,可配置函数名称 """ rclpy.init(args=args) # 初始化rclpy node = Li4Node() # 新建一个节点 rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C) rclpy.shutdown() # rcl关闭 -
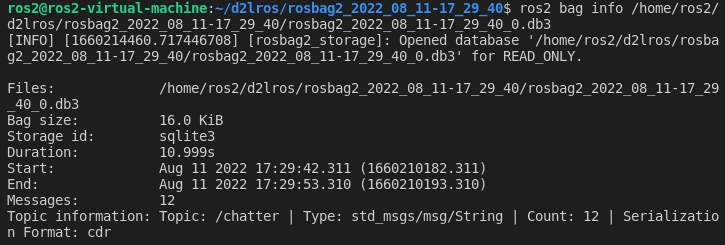
@1206768372 先使用ros2 bag info 看看,我怕你的这个包是空的
-
@小鱼 是有内容的呀
-
@1206768372 哇,确实很奇怪了,找到了一个类似的错误,貌似可以解决。
-
ros2 bag play -s sqlites3 XXX.db3。
指定读取方式 -
 小 小鱼 从 中的 动手学ROS2 移动了该主题
小 小鱼 从 中的 动手学ROS2 移动了该主题