@青稞月亮饼 把小鱼的基础教程先看一遍再说吧
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1206768372 发布的最新帖子
-
RE: Moveit2教程中,无法通过点击RvizVisualGui里的next使机械臂执行规划的路径发布在 机械臂运动规划
@小鱼 问题终于解决了 Moveit2的官方教程有些问题。
首先得先把原本默认使用的Fast DDS改成 Cyclone DDS
sudo apt install ros-rolling-rmw-cyclonedds-cpp或者跟着这个
然后重启终端
接着再打开hello_moveit.cpp
把这一段初始化提到新建一个Thread之前
// Create the MoveIt MoveGroup Interface using moveit::planning_interface::MoveGroupInterface; auto move_group_interface = MoveGroupInterface(node, "panda_arm"); // We spin up a SingleThreadedExecutor so MoveItVisualTools interact with ROS rclcpp::executors::SingleThreadedExecutor executor; executor.add_node(node); auto spinner = std::thread([&executor]() { executor.spin(); });接着重新编译 就可以解决了!
GitHub上的解决办法在这
-
如何快捷的使用moveit2发布在 机械臂运动规划
最近一直在和moveit2斗智斗勇。但是遇到很多问题总是令人觉得很迷茫,不知道该怎么下手。我只能来求助小鱼了QAQ
1.moveit2官方教程使用传统方法编译安装。源码下载量大,编译时间超长,经常半个小时一个小时就花在colcon build上了。不仅如此编译时还经常出错。有时候看上去编译完成了,但是结果跟着教程一跑demo就出各种各样的问题。比如说,panda机械臂初始位置产生碰撞,以至于在路径执行时频频报错。导入motionplanning模块后缺少互动标识,结果只能看着黄黄绿绿的机械臂重叠在一起干瞪眼。磨磨蹭蹭好不容易跟着教程走了一半后,rviz又莫名其妙的没反应。真的把人的心性全磨掉了。
2.听说docker可以避免这些配置环境的过程,但是光是更换docker源+拉取镜像就花了我不少的时间。但最后也只是在本地生成的容器里不知所措,网上docker结合ROS2也少,光是尝试docker结合vscode的教程就花了我好久,但是这一步还是出错了。
总之就是遇到各种各样的问题,
 好不容易解决一个又会冒出另一个。我现在是真不知道该怎么学Moveit2.求鱼哥救救我
好不容易解决一个又会冒出另一个。我现在是真不知道该怎么学Moveit2.求鱼哥救救我
-
Moveit2教程中,无法通过点击RvizVisualGui里的next使机械臂执行规划的路径发布在 机械臂运动规划
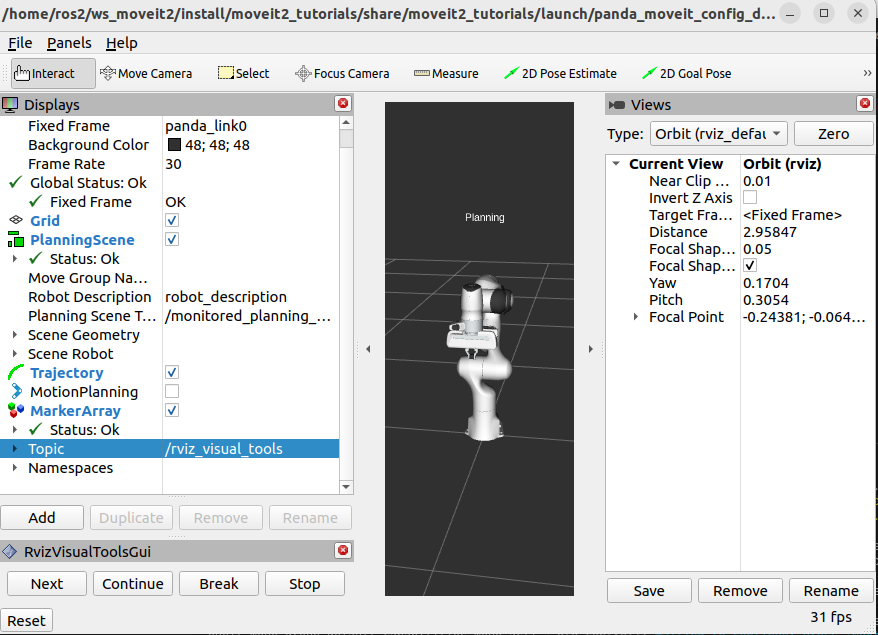
Moveit2的官方教程里的Visualizing In RViz部分
这一部分的最后应该可以通过点击两下RvizVisualGui里面的Next分别让Moveit执行Planning和Execut两个部分
但是我现在只能Planning,怎么点击next都没用
就像这样
程序代码
#include <memory> #include <thread> // <---- add this to the set of includes at the top #include <rclcpp/rclcpp.hpp> #include <moveit/move_group_interface/move_group_interface.h> #include <moveit_visual_tools/moveit_visual_tools.h> int main(int argc, char *argv[]) { // Initialize ROS and create the Node rclcpp::init(argc,argv); auto const node = std::make_shared<rclcpp::Node>( "hello_moveit", rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true) ); // Create a ROS logger auto const logger = rclcpp::get_logger("hello_moveit"); // We spin up a SingleThreadedExecutor so MoveItVisualTools interact with ROS rclcpp::executors::SingleThreadedExecutor executor; executor.add_node(node); auto spinner = std::thread([&executor]() { executor.spin(); }); // Create the MoveIt MoveGroup Interface using moveit::planning_interface::MoveGroupInterface; auto move_group_interface = MoveGroupInterface(node, "panda_arm"); // Construct and initialize MoveItVisualTools auto moveit_visual_tools = moveit_visual_tools::MoveItVisualTools{ node, "panda_link0", rviz_visual_tools::RVIZ_MARKER_TOPIC, move_group_interface.getRobotModel()}; moveit_visual_tools.deleteAllMarkers(); moveit_visual_tools.loadRemoteControl(); // Create a closures for visualization auto const draw_title = [&moveit_visual_tools](auto text) { auto const text_pose = [] { auto msg = Eigen::Isometry3d::Identity(); msg.translation().z() = 1.0; return msg; }(); moveit_visual_tools.publishText(text_pose, text, rviz_visual_tools::WHITE, rviz_visual_tools::XLARGE); }; auto const prompt = [&moveit_visual_tools](auto text) { moveit_visual_tools.prompt(text); }; auto const draw_trajectory_tool_path = [&moveit_visual_tools, jmg = move_group_interface.getRobotModel()->getJointModelGroup( "panda_arm")](auto const trajectory) { moveit_visual_tools.publishTrajectoryLine(trajectory, jmg); }; // Set a target Pose auto const target_pose = []{ geometry_msgs::msg::Pose msg; msg.orientation.w = 1.0; msg.position.x = 0.28; msg.position.y = -0.2; msg.position.z = 0.5; return msg; }(); move_group_interface.setPoseTarget(target_pose); // Create a plan to that target pose prompt("Press 'Next' in the RvizVisualToolsGui window to plan"); draw_title("Planning"); moveit_visual_tools.trigger(); auto const [success, plan] = [&move_group_interface] { moveit::planning_interface::MoveGroupInterface::Plan msg; auto const ok = static_cast<bool>(move_group_interface.plan(msg)); return std::make_pair(ok, msg); }(); // Execute the plan if (success) { draw_trajectory_tool_path(plan.trajectory_); moveit_visual_tools.trigger(); prompt("Press 'Next' in the RvizVisualToolsGui window to execute"); draw_title("Executing"); moveit_visual_tools.trigger(); move_group_interface.execute(plan); } else { draw_title("Planning Failed!"); moveit_visual_tools.trigger(); RCLCPP_ERROR(logger, "Planing failed!"); } // Shutdown ROS rclcpp::shutdown(); draw_title("Planning Failed!"); moveit_visual_tools.trigger(); spinner.join(); // <--- Join the thread before exiting return 0; }节点 的info
ros2@ros2-virtual-machine:~/ws_moveit2$ ros2 run hello_moveit hello_moveit [INFO] [1661360488.626960032] [moveit_rdf_loader.rdf_loader]: Loaded robot model in 0.0678787 seconds [INFO] [1661360488.628283941] [moveit_robot_model.robot_model]: Loading robot model 'panda'... [WARN] [1661360488.695523433] [moveit_ros.robot_model_loader]: No kinematics plugins defined. Fill and load kinematics.yaml! [INFO] [1661360488.720934001] [move_group_interface]: Ready to take commands for planning group panda_arm. [INFO] [1661360488.724223353] [hello_moveit.remote_control]: RemoteControl Ready. [INFO] [1661360488.725084425] [hello_moveit.remote_control]: Waiting to continue: Press 'Next' in the RvizVisualToolsGui window to plan [INFO] [1661360492.640161451] [hello_moveit.remote_control]: ... continuing [INFO] [1661360492.644604333] [move_group_interface]: MoveGroup action client/server ready seconds [INFO] [1661360488.628283941] [moveit_robot_model.robot_model]: Loading robot model 'panda'... [WARN] [1661360488.695523433] [moveit_ros.robot_model_loader]: No kinematics plugins defined. Fill and load kinematics.yaml! [INFO] [1661360488.720934001] [move_group_interface]: Ready to take commands for planning group panda_arm. [INFO] [1661360488.724223353] [hello_moveit.remote_control]: RemoteControl Ready. [INFO] [1661360488.725084425] [hello_moveit.remote_control]: Waiting to continue: Press 'Next' in the RvizVisualToolsGui window to plan [INFO] [1661360492.640161451] [hello_moveit.remote_control]: ... continuing [INFO] [1661360492.644604333] [move_group_interface]: MoveGroup action client/server readyRViz的info
[move_group-4] You can start planning now! [move_group-4] [spawner-7] [INFO] [1661360353.318260256] [spawner_panda_arm_controller]: Configured and activated panda_arm_controller [spawner-8] [INFO] [1661360353.327594408] [spawner_panda_hand_controller]: Configured and activated panda_hand_controller [spawner-6] [INFO] [1661360353.383695147] [spawner_joint_state_broadcaster]: Configured and activated joint_state_broadcaster [INFO] [spawner-8]: process has finished cleanly [pid 94207] [INFO] [spawner-7]: process has finished cleanly [pid 94204] [INFO] [spawner-6]: process has finished cleanly [pid 94200] [rviz2-1] [INFO] [1661360354.267672189] [rviz2]: Stereo is NOT SUPPORTED [rviz2-1] [INFO] [1661360354.267899244] [rviz2]: OpenGl version: 4.1 (GLSL 4.1) [rviz2-1] [INFO] [1661360354.351648952] [rviz2]: Stereo is NOT SUPPORTED [rviz2-1] Warning: class_loader.impl: SEVERE WARNING!!! A namespace collision has occurred with plugin factory for class rviz_default_plugins::displays::InteractiveMarkerDisplay. New factory will OVERWRITE existing one. This situation occurs when libraries containing plugins are directly linked against an executable (the one running right now generating this message). Please separate plugins out into their own library or just don't link against the library and use either class_loader::ClassLoader/MultiLibraryClassLoader to open. [rviz2-1] at line 253 in /opt/ros/humble/include/class_loader/class_loader/class_loader_core.hpp [rviz2-1] [ERROR] [1661360357.821614316] [moveit_ros_visualization.motion_planning_frame]: Action server: /recognize_objects not available [rviz2-1] [INFO] [1661360357.873758611] [moveit_rdf_loader.rdf_loader]: Loaded robot model in 0.00513378 seconds [rviz2-1] [INFO] [1661360357.874944292] [moveit_robot_model.robot_model]: Loading robot model 'panda'... [rviz2-1] [WARN] [1661360358.716952499] [rcl.logging_rosout]: Publisher already registered for provided node name. If this is due to multiple nodes with the same name then all logs for that logger name will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic. [rviz2-1] [INFO] [1661360358.751094199] [moveit_rdf_loader.rdf_loader]: Loaded robot model in 0.00200306 seconds [rviz2-1] [INFO] [1661360358.751463280] [moveit_robot_model.robot_model]: Loading robot model 'panda'... [rviz2-1] Link panda_link1 had 1 children [rviz2-1] Link panda_link2 had 1 children [rviz2-1] Link panda_link3 had 1 children [rviz2-1] Link panda_link4 had 1 children [rviz2-1] Link panda_link5 had 1 children [rviz2-1] Link panda_link6 had 1 children [rviz2-1] Link panda_link7 had 1 children [rviz2-1] Link panda_link8 had 1 children [rviz2-1] Link panda_hand had 2 children [rviz2-1] Link panda_leftfinger had 0 children [rviz2-1] Link panda_rightfinger had 0 children [rviz2-1] [INFO] [1661360359.083960168] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Starting planning scene monitor [rviz2-1] [INFO] [1661360359.097253739] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Listening to '/monitored_planning_scene' [move_group-4] [INFO] [1661360375.585521251] [moveit_move_group_default_capabilities.move_action_capability]: Received request [move_group-4] [INFO] [1661360375.586967901] [moveit_move_group_default_capabilities.move_action_capability]: executing.. [move_group-4] [INFO] [1661360375.601250081] [moveit_move_group_default_capabilities.move_action_capability]: Planning request received for MoveGroup action. Forwarding to planning pipeline. [move_group-4] [INFO] [1661360375.686041510] [moveit.ompl_planning.model_based_planning_context]: Planner configuration 'panda_arm' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed. [move_group-4] [INFO] [1661360383.336210974] [moveit_move_group_default_capabilities.move_action_capability]: Motion plan was computed successfully. [rviz2-1] [ERROR] [1661360383.348745116] [moveit_rviz_plugin_render_tools.trajectory_visualization]: No robot state or robot model loaded [rviz2-1] [INFO] [1661360435.917535550] [moveit_rdf_loader.rdf_loader]: Loaded robot model in 0.0237417 seconds [rviz2-1] [INFO] [1661360435.917753658] [moveit_robot_model.robot_model]: Loading robot model 'panda'... [rviz2-1] [INFO] [1661360436.272922611] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Stopping planning scene monitor [rviz2-1] [INFO] [1661360436.344188261] [moveit_rdf_loader.rdf_loader]: Loaded robot model in 0.00450804 seconds [rviz2-1] [INFO] [1661360436.344267960] [moveit_robot_model.robot_model]: Loading robot model 'panda'... [rviz2-1] Link panda_link1 had 1 children [rviz2-1] Link panda_link2 had 1 children [rviz2-1] Link panda_link3 had 1 children [rviz2-1] Link panda_link4 had 1 children [rviz2-1] Link panda_link5 had 1 children [rviz2-1] Link panda_link6 had 1 children [rviz2-1] Link panda_link7 had 1 children [rviz2-1] Link panda_link8 had 1 children [rviz2-1] Link panda_hand had 2 children [rviz2-1] Link panda_leftfinger had 0 children [rviz2-1] Link panda_rightfinger had 0 children [rviz2-1] [INFO] [1661360436.608225858] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Starting planning scene monitor [rviz2-1] [INFO] [1661360436.611345331] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Listening to '/monitored_planning_scene' [move_group-4] [INFO] [1661360492.648210808] [moveit_move_group_default_capabilities.move_action_capability]: Received request [move_group-4] [INFO] [1661360492.648641234] [moveit_move_group_default_capabilities.move_action_capability]: executing.. [move_group-4] [INFO] [1661360492.660429954] [moveit_move_group_default_capabilities.move_action_capability]: Planning request received for MoveGroup action. Forwarding to planning pipeline. [move_group-4] [INFO] [1661360492.696150698] [moveit.ompl_planning.model_based_planning_context]: Planner configuration 'panda_arm' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed. [move_group-4] [INFO] [1661360501.549985786] [moveit_move_group_default_capabilities.move_action_capability]: Motion plan was computed successfully. [rviz2-1] [ERROR] [1661360501.551738192] [moveit_rviz_plugin_render_tools.trajectory_visualization]: No robot state or robot model loaded -
RE: RVIZ2 找不到QT平台插件 Could not find the Qt platform plugin "wayland" in ""发布在 ROS2
@1206768372
程序是找小鱼的复制黏贴的
launch文件import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): package_name = 'fishbot_description' urdf_name = "fishbot_base.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') #robot_state_publisher_node负责发布机器人模型信息robot_description,并将joint_states数据转换tf信息发布 robot_state_publisher_node = Node( package='robot_state_publisher', executable='robot_state_publisher', arguments=[urdf_model_path] ) #负责发布机器人关节数据信息,通过joint_states话题发布 joint_state_publisher_node = Node( package='joint_state_publisher_gui', executable='joint_state_publisher_gui', name='joint_state_publisher_gui', arguments=[urdf_model_path] ) rviz2_node = Node( package='rviz2', executable='rviz2', name='rviz2', output='screen', ) ld.add_action(robot_state_publisher_node) ld.add_action(joint_state_publisher_node) ld.add_action(rviz2_node) return ldsetup文件
from setuptools import setup from glob import glob## import os## package_name = 'fishbot_description' setup( name=package_name, version='0.0.0', packages=[package_name], data_files=[ ('share/ament_index/resource_index/packages', ['resource/' + package_name]), ('share/' + package_name, ['package.xml']), (os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),## (os.path.join('share', package_name, 'urdf'), glob('urdf/**')),## ], install_requires=['setuptools'], zip_safe=True, maintainer='root', maintainer_email='root@todo.todo', description='TODO: Package description', license='TODO: License declaration', tests_require=['pytest'], entry_points={ 'console_scripts': [ ], }, ) -
RVIZ2 找不到QT平台插件 Could not find the Qt platform plugin "wayland" in ""发布在 ROS2
下面是完整的报错信息
ros2@ros2-virtual-machine:~/d2lros/chapt8/fishbot_ws$ ros2 launch fishbot_description display_rviz2.launch.py [INFO] [launch]: All log files can be found below /home/ros2/.ros/log/2022-08-18-13-44-13-635600-ros2-virtual-machine-5560 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [robot_state_publisher-1]: process started with pid [5572] [INFO] [joint_state_publisher_gui-2]: process started with pid [5574] [INFO] [rviz2-3]: process started with pid [5576] [rviz2-3] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in "" [robot_state_publisher-1] [WARN] [1660801457.094932948] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future. [robot_state_publisher-1] Link laser_link had 0 children [robot_state_publisher-1] [INFO] [1660801457.720892835] [robot_state_publisher]: got segment base_link [robot_state_publisher-1] [INFO] [1660801457.720969078] [robot_state_publisher]: got segment laser_link [rviz2-3] [INFO] [1660801458.613988022] [rviz2]: Stereo is NOT SUPPORTED [rviz2-3] [INFO] [1660801458.614231508] [rviz2]: OpenGl version: 4.1 (GLSL 4.1) [rviz2-3] [INFO] [1660801458.957211916] [rviz2]: Stereo is NOT SUPPORTED [joint_state_publisher_gui-2] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in "" [joint_state_publisher_gui-2] [INFO] [1660801460.875772212] [joint_state_publisher_gui]: Centering
 而且恐怕只在双系统的linux上运行容器才有意义吧
而且恐怕只在双系统的linux上运行容器才有意义吧