请问:如何让urdf模型通过终端完成关节运动
-
版本 ros-foxy
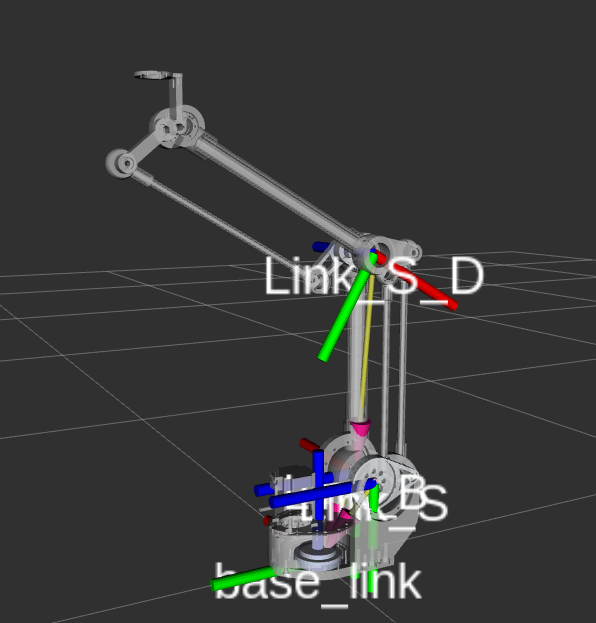
比如 该码垛机械臂 通过ros2实现关节控制
该机械臂是三自由度的机械臂,分别是base_link,Link_B,Link_S
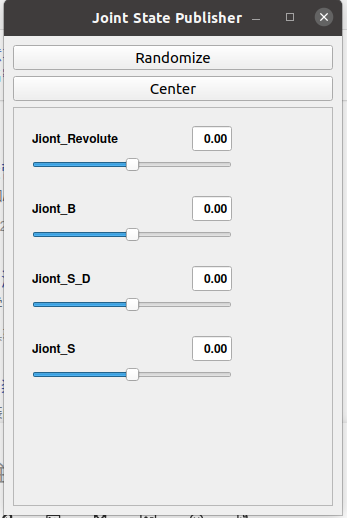
注:Jiont_S_D 是根据Link_B,Link_S 的角度改变发生改变目前我能够实现从SW模型倒入到rviz里面,通过自带界面完成关节运动
-
8 847718956 将这个主题转为问答主题,在
-
@847718956 这个其实不难哈,你如果了解joint_state_publisher_gui这个界面是如何控制机械臂的,一定就知道怎么做了。
参考动手学ROS2文档:https://fishros.com/d2lros2/#/humble/chapt8/get_started/4.通过JointStates控制RVIZ2关节
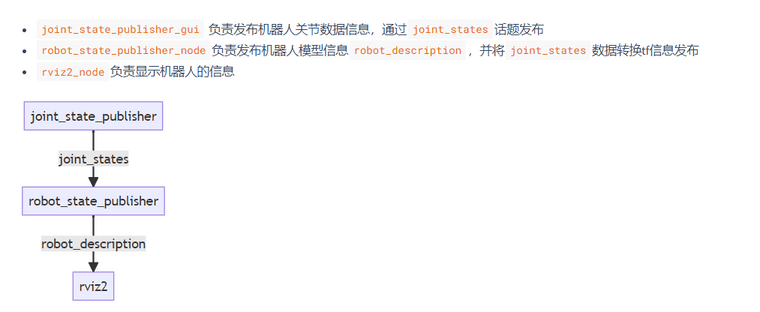
具体方案就是不要joint_states_publisher,而是手动写个代码发布joint_states话题数据即可。
参考代码:
#!/usr/bin/env python3 import rclpy from rclpy.node import Node # 1.导入消息类型JointState from sensor_msgs.msg import JointState import threading import time class RotateWheelNode(Node): def __init__(self,name): super().__init__(name) self.get_logger().info(f"node {name} init..") # 创建并初始化发布者成员属性pub_joint_states_ self.joint_states_publisher_ = self.create_publisher(JointState,"joint_states", 10) # 初始化数据 self._init_joint_states() self.pub_rate = self.create_rate(30) self.thread_ = threading.Thread(target=self._thread_pub) self.thread_.start() def _init_joint_states(self): # 初始左右轮子的速度 self.joint_speeds = [0.0,0.0] self.joint_states = JointState() self.joint_states.header.stamp = self.get_clock().now().to_msg() self.joint_states.header.frame_id = "" # 关节名称 self.joint_states.name = ['left_wheel_joint','right_wheel_joint'] # 关节的位置 self.joint_states.position = [0.0,0.0] # 关节速度 self.joint_states.velocity = self.joint_speeds # 力 self.joint_states.effort = [] def update_speed(self,speeds): self.joint_speeds = speeds def _thread_pub(self): last_update_time = time.time() while rclpy.ok(): delta_time = time.time()-last_update_time last_update_time = time.time() # 更新位置 self.joint_states.position[0] += delta_time*self.joint_states.velocity[0] self.joint_states.position[1] += delta_time*self.joint_states.velocity[1] # 更新速度 self.joint_states.velocity = self.joint_speeds # 更新 header self.joint_states.header.stamp = self.get_clock().now().to_msg() # 发布关节数据 self.joint_states_publisher_.publish(self.joint_states) self.pub_rate.sleep() def main(args=None): rclpy.init(args=args) # 初始化rclpy node = RotateWheelNode("rotate_fishbot_wheel") # 新建一个节点 node.update_speed([15.0,-15.0]) rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C) rclpy.shutdown() # 关闭rclpy -
@小鱼 我使用aqt-grap生成的关系如下图,多了/robot_description
 \
\相比动手学Ros2文档内的关系图,我认为该模型不仅一些固定的坐标轴发生旋转,而且其他的位置的坐标轴也发生改变了
-
@小鱼 我使用aqt-grap生成的关系如下图,多了/robot_description
问题:需要做一个客户端吗,请求是不是和发布joint_states话题数据相同,在接收到的/robot_decription的数据该怎么做处理
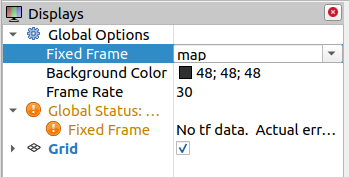
当前进度我可以完成发布joint_states话题,但rviz打不开

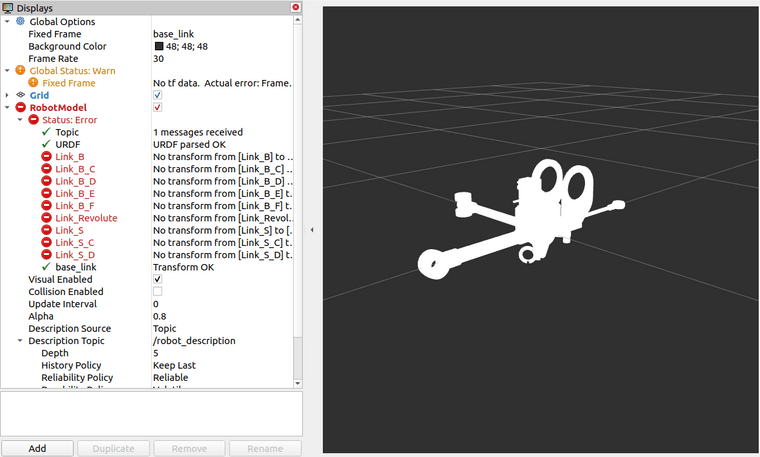
采用参考文档的launch文件,Fixed Frame下拉菜单不能点
参考文档的launch文件
import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): package_name = 'rviz_example' urdf_name = "rviz_example.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') robot_state_publisher_node = Node( package='robot_state_publisher', executable='robot_state_publisher', arguments=[urdf_model_path] ) joint_state_publisher_node = Node( package='joint_state_publisher_gui', executable='joint_state_publisher_gui', name='joint_state_publisher_gui', arguments=[urdf_model_path] ) rviz2_node = Node( package='rviz2', executable='rviz2', name='rviz2', output='screen', ) ld.add_action(robot_state_publisher_node) #ld.add_action(joint_state_publisher_node) ld.add_action(rviz2_node) return ld我之前的launch文件
from ament_index_python.packages import get_package_share_path from launch import LaunchDescription from launch.actions import DeclareLaunchArgument from launch.conditions import IfCondition, UnlessCondition from launch.substitutions import Command, LaunchConfiguration from launch_ros.actions import Node from launch_ros.parameter_descriptions import ParameterValue def generate_launch_description(): urdf_tutorial_path = get_package_share_path('rviz_example') default_model_path = urdf_tutorial_path / 'urdf/rviz_example.urdf' default_rviz_config_path = urdf_tutorial_path / 'rviz/urdf.rviz' gui_arg = DeclareLaunchArgument(name='gui', default_value='true', choices=['true', 'false'], description='Flag to enable joint_state_publisher_gui') model_arg = DeclareLaunchArgument(name='model', default_value=str(default_model_path), description='Absolute path to robot urdf file') rviz_arg = DeclareLaunchArgument(name='rvizconfig', default_value=str(default_rviz_config_path), description='Absolute path to rviz config file') robot_description = ParameterValue(Command(['xacro ', LaunchConfiguration('model')]), value_type=str) robot_state_publisher_node = Node( package='robot_state_publisher', executable='robot_state_publisher', parameters=[{'robot_description': robot_description}] ) # Depending on gui parameter, either launch joint_state_publisher or joint_state_publisher_gui joint_state_publisher_gui_node = Node( package='joint_state_publisher_gui', executable='joint_state_publisher_gui', condition=IfCondition(LaunchConfiguration('gui')) ) rviz_node = Node( package='rviz2', executable='rviz2', name='rviz2', output='screen', arguments=['-d', LaunchConfiguration('rvizconfig')], ) return LaunchDescription([ gui_arg, model_arg, rviz_arg, joint_state_publisher_gui_node, robot_state_publisher_node, rviz_node ]) -
@847718956 在 请问:如何让urdf模型通过终端完成关节运动 中说:
需要做一个客户端吗,请求是不是和发布joint_states话题数据相同,在接收到的/robot_decription的数据该怎么做处理
需要写一个节点发布/joint_states信息,话题内容要包含你机械臂的关节名称,我提供的代码里的关节名称是fishbot的关节名称,你要修改成你的关节名称
@小鱼 在 请问:如何让urdf模型通过终端完成关节运动 中说:
关节名称
self.joint_states.name = ['left_wheel_joint','right_wheel_joint']另外就是机械臂的关节是有上下限制的,所以不能直接用我给的程序那样子不断的递增发布数据,也要修改一下,简单改了一个版本。
你把这个文件写成一个节点,放到launch文件,替代原来的joint_state_publisher_gui就可以
#!/usr/bin/env python3 import rclpy from rclpy.node import Node # 1.导入消息类型JointState from sensor_msgs.msg import JointState import threading import time class RotateWheelNode(Node): def __init__(self,name): super().__init__(name) self.get_logger().info(f"node {name} init..") # 创建并初始化发布者成员属性pub_joint_states_ self.joint_states_publisher_ = self.create_publisher(JointState,"joint_states", 10) # 初始化数据 self._init_joint_states() self.pub_rate = self.create_rate(30) self.thread_ = threading.Thread(target=self._thread_pub) self.thread_.start() def _init_joint_states(self): # 初始左右轮子的速度 self.joint_speeds = [0.0,0.0] self.joint_states = JointState() self.joint_states.header.stamp = self.get_clock().now().to_msg() self.joint_states.header.frame_id = "" # 关节名称 self.joint_states.name = ['link1','link2','xxx','...] # 关节的位置 self.joint_states.position = [0.0,0.0,xxx,...] # 力 self.joint_states.effort = [] def update_position (self,position): self.joint_states.position= position def _thread_pub(self): while rclpy.ok(): # 更新 header self.joint_states.header.stamp = self.get_clock().now().to_msg() # 发布关节数据 self.joint_states_publisher_.publish(self.joint_states) self.pub_rate.sleep() def main(args=None): rclpy.init(args=args) # 初始化rclpy node = RotateWheelNode("rotate_fishbot_wheel") # 新建一个节点 node.update_position ([0.0,0.0,xxx,...]) rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C) rclpy.shutdown() # 关闭rclpy -
@小鱼 已解决
joint_states.name 导入的是.urdf中的Joint的名称,不是Link的名称 -