结合ros2和pyqt5编写小乌龟控制界面
-
class MainWindowTurtle(QWidget, Ui_turtel, SubAndPub): def __init__(self): super(MainWindowTurtle, self).__init__() Ui_turtel.__init__(self) SubAndPub.__init__(self) self.setupUi(self) self.timer = QTimer(self) self.timer.timeout.connect(self.sensor_data_update) self.timer.start(10) self.pushButton_5.clicked.connect(self.color_set) def sensor_data_update(self): self.label_7.setText(str(self.pose_msg_x)) self.label_8.setText(str(self.pose_msg_y)) self.label_10.setText(str(self.pose_msg_th)) self.label_13.setText(str(self.cmd_msg_x)) self.label_14.setText(str(self.cmd_msg_z)) rclpy.spin_once(self) def color_set(self): # self.color_msg.r = int(self.lineEdit.text()) # self.color_msg.g = int(self.lineEdit_2.text()) # self.color_msg.b = int(self.lineEdit_3.text()) # r = rclpy.parameter.Parameter('/turtlesim background_r', rclpy.Parameter.Type.INTEGER, self.color_msg.r) # g = rclpy.parameter.Parameter('/turtlesim background_g', rclpy.Parameter.Type.INTEGER, self.color_msg.g) # b = rclpy.parameter.Parameter('/turtlesim background_b', rclpy.Parameter.Type.INTEGER, self.color_msg.b) self.declare_parameters('turtlesim', [('turtlesim background_r', 0), ('turtlesim background_g', 0), ('turtlesim background_b', 0)]) print(self.get_parameter('/turtlesim background_r').get_parameter_value().integer_value) self.lineEdit.setText(str(self.get_parameter('/turtlesim background_r').get_parameter_value().string_value)) self.lineEdit_2.setText(str(self.get_parameter('/turtlesim background_g').get_parameter_value().string_value)) self.lineEdit_3.setText(str(self.get_parameter('/turtlesim background_b').get_parameter_value().string_value)) # all_new_parameters = [r,g,b] # print(all_new_parameters) # self.set_parameters(all_new_parameters) class SubAndPub(Node): def __init__(self): self.cmd_msg_z = None self.cmd_msg_x = None self.pose_msg_th = None self.pose_msg_y = None self.pose_msg_x = None rclpy.init(args=None) super().__init__('sub_and_pub') self.color_pub = None self.cmd_pub = None self.pose_msg = None self.sub_pose = None self.cmd_msg = None self.sub_cmd_vel = None self.cmd_pub = self.create_publisher(Twist, '/turtle1/cmd_vel', 10) self.color_pub = self.create_publisher(Color, '/turtle1/color_sensor', 10) self.sub_cmd_vel = self.create_subscription(Twist, '/turtle1/cmd_vel', self.CmdVelCallBack, 10) self.sub_pose = self.create_subscription(Pose, '/turtle1/pose', self.PoseCallBack, 10) self.color_msg = Color() self.cmd_vel_msg = Twist() def CmdVelCallBack(self, msg): self.cmd_msg_x = msg.linear.x self.cmd_msg_z = msg.angular.z def PoseCallBack(self, msg): self.pose_msg_x = msg.x self.pose_msg_y = msg.y self.pose_msg_th = msg.theta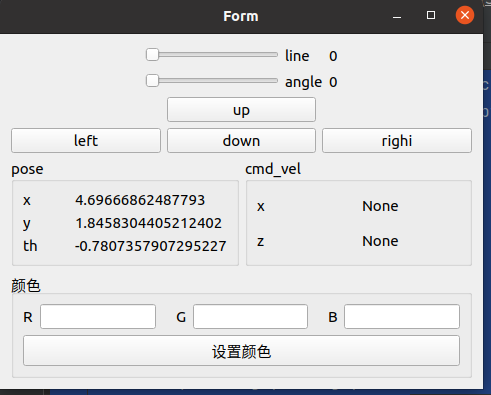
报错:
Traceback (most recent call last):
File "control_main.py", line 45, in color_set
print(self.get_parameter('/turtlesim background_r').get_parameter_value().integer_value)
File "/opt/ros/foxy/lib/python3.8/site-packages/rclpy/node.py", line 513, in get_parameter
raise ParameterNotDeclaredException(name)
rclpy.exceptions.ParameterNotDeclaredException: ('Invalid access to undeclared parameter(s)', '/turtlesim background_r') -
我是用python3运行的,一直告诉我没有声明,我修改turtlesim的参数还需要再声明么,我应该已经声明参数了
-
@小鱼 求助,怎么通过界面输入修改海龟模拟器的背景颜色
-
@275253468 修改颜色是通过服务进行的,所以程序的逻辑就是,当点击设置颜色按钮时,获取RGB三个框的值,接着发送一个服务请求就可以了。
大家好,我是爱吃瓜皮的小鱼。今天一不小心加班加到了11点,幸亏周末努力搞了存货,今天就介绍一下ROS2的参数,并且带你一起动手把乌龟模拟器搞绿~
1. 参数背景
前面章节中,我们动手创建了ROS2镇子和几个村庄。其中作家李四一名灵魂写手,《艳娘传奇》更新速度牵着着很多村民的心。
李四写小说的速度是在我们创建李四的时候,所使用的timer周期决定的,不知道你还记不记得下面这一段代码:
timer_period = 1 #李四的手速,每1s写一段话,够不够快 self.timer = self.create_timer(timer_period, self.timer_callback) #启动一个定时装置,每 1 s,调用一次time_callback函数这里我们用了一个time_period来控制timer执行回调函数的速度,但是当我们写好速度运行李四节点后,我们就没有办法改变回调函数的周期,控制李四写小说的速度了。
我们可以把写小说的速度当作李四这个节点的一个设置,就像亮度值是显示器的一个设置一样。既然在显示器运行时可以修改显示器的亮度,那可以在李四运行时改变这个周期值设置呢?
小思考:在一个机器人上的节点会有哪些设置?
根据需求,ROS2为我们准好了一整套的解决方案机制。
2.解决问题-参数
ROS2官方对参数的定义是:
A parameter is a configuration value of a node. You can think of parameters as node settings.
有请翻译官小鱼
参数是节点的一个配置值,你可以任务参数是一个节点的设置
感谢小鱼同学的精彩翻译,ROS2的参数就是节点的设置,和我们上面提出的需求不谋而合,有了参数我们就可以实现动态的改变李四写小说的速度了
3.论参数组成成分
ROS2参数是由键值对组成的,此话怎讲?键值对指的是就是名字和数值,比方说
- 名字:李四写小说周期,值:5s
- 名字:显示器亮度,值:60%
名字的数据类型小鱼不多说肯定是字符串了,值的数据类型呢?我们这里用到的是5是整形数据,显然只有一个整形是不够用的,ROS2支持的值的类型如下:
- bool 和bool[],布尔类型用来表示开关,比如我们可以控制雷达控制节点,开始扫描和停止扫描。
- int64 和int64[],整形表示一个数字,含义可以自己来定义,这里我们可以用来表示李四节点写小说的周期值
- float64 和float64[],浮点型,可以表示小数类型的参数值
- string 和string[],字符串,可以用来表示雷达控制节点中真实雷达的ip地址
- byte[],字节数组,这个可以用来表示图片,点云数据等信息
4.体验参数
我们使用乌龟模拟器来体验一下参数,同时讲解一下常用的参数的命令行工具。
4.1 运行小乌龟模拟器节点和小乌龟控制节点
打开终端
ros2 run turtlesim turtlesim_node再打开一个终端
ros2 run turtlesim turtle_teleop_key可以看到下面的蓝蓝的模拟器
4.2 查看节点有哪些参数(设置)
我们可以使用下面的指令来查看所有节点的参数列表,打开一个终端,运行下面的指令
ros2 param list![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HaAF7CLI-1630942542984)(5.1ROS2参数介绍/imgs/image-20210903125400440.png)]](https://img-blog.csdnimg.cn/9788661c83034d61839774f2126d0aec.png)
写代码为什么要做到见名知意?我们看到乌龟模拟器的四个参数,background背景bgr指的是blue、green、red。简而言之就是背景颜色。那这几个参数应该可以控制乌龟模拟器的背景颜色。
最后一个use_sim_time是每个节点都带的,消息回放相关,后面小鱼写篇文章稍微讲讲。
如果看不懂,还可以有一个方法详细查看一个参数的信息。
ros2 param describe <node_name> <param_name>比如:
ros2 param describe /turtlesim background_b![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QTw4lBRS-1630942542997)(5.1ROS2参数介绍/imgs/image-20210903150815050.png)]](https://img-blog.csdnimg.cn/033617a0f2f6491f99062d31e790d148.png)
这里就可以详细的看到参数的名字,参数的描述,参数的类型,还有对参数的约束,最大值最小值等。
4.3 查看参数值
参数的组成由名字和值(键值组成),名字可以通过
param list获取,值该使用指令获取呢?下面这个命令行工具可以帮助我们获取参数的值
ros2 param get /turtlesim background_b运行一下,你会发现结果是255,蓝色进度条打满,再看看r红色和g绿色。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-fkXYIF5T-1630942543018)(5.1ROS2参数介绍/imgs/image-20210903142905553.png)]](https://img-blog.csdnimg.cn/049cb24278d2451fab3fff632f7e0642.png)
分别是255,86,69
4.4 设置参数
找到了参数和值,接着我们来改变一下乌龟模拟器的颜色。
打开小鱼精心准备的在线工具:https://fishros.com/tools/pickr
选取一个自己喜欢的颜色,这里小鱼就选绿色,因为乌龟模拟器换成绿色的应该很奇怪。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-bB9lbQ4Q-1630942543032)(5.1ROS2参数介绍/imgs/image-20210903145055215.png)]](https://img-blog.csdnimg.cn/ddfd2a08409942369e03e96146883ade.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA6bG86aaZUk9T,size_20,color_FFFFFF,t_70,g_se,x_16)
可以看到当前的这个颜色,r为44,g为156,b为10,接着我们可以使用下面的指令来设置参数的值。
ros2 param set <node_name> <parameter_name> <value>我们依次修改参数值:
ros2 param set /turtlesim background_r 44 ros2 param set /turtlesim background_g 156 ros2 param set /turtlesim background_b 10接着你可以看到这样的颜色的乌龟模拟器(绿的令人发慌)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kKHX8Xuy-1630942543042)(5.1ROS2参数介绍/imgs/image-20210903145702524.png)]](https://img-blog.csdnimg.cn/b3c50b2d9287472f9a083e8869012e02.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA6bG86aaZUk9T,size_18,color_FFFFFF,t_70,g_se,x_16)
需要留意的是,我们修改的背景数据并没有被存储,只是临时修改。重新启动节点乌龟模拟器依然还是原来的蓝色,不是我们想要的绿色的。
4.5 把参数存起来
把参数存起来其实就相当去把当前的参数值拍一张快照,然后保存下来,后面可以用于恢复参数到当前的数值。
可以使用下面的命令进行操作:
ros2 param dump <node_name>4.5.1 给乌龟模拟器参数拍照
比如我们要保存乌龟模拟器的节点数据,可以采用下面的指令;
os2 param dump /turtlesim![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MCJUvze2-1630942543055)(5.1ROS2参数介绍/imgs/image-20210903150318055.png)]](https://img-blog.csdnimg.cn/251651f143ff4b46bfaf1f886f831d58.png)
文件被保存成了yaml格式,用cat指令看一看
cat ./turtlesim.yaml![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-U3xMG9LI-1630942543066)(5.1ROS2参数介绍/imgs/image-20210903150423697.png)]](https://img-blog.csdnimg.cn/fc57097176ea49a3bd6151bea60d4082.png)
4.5.2 恢复参数值
我们
Ctrl+C关闭乌龟模拟器,然后再重新运行。ros2 run turtlesim turtlesim_node![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dCRFEFm2-1630942543086)(5.1ROS2参数介绍/imgs/image-20210903151103098.png)]](https://img-blog.csdnimg.cn/c37e7af470324086a4365ac507360849.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA6bG86aaZUk9T,size_16,color_FFFFFF,t_70,g_se,x_16)
可以看到模拟器又变成了蓝色了,接着通过param的load的方法把参数值恢复成我们之前存储的。
ros2 param load /turtlesim ./turtlesim.yaml
几乎是瞬间,乌龟模拟器又被我们搞绿了
4.5.3 启动节点时加载参数快照
有什么办法一开始就让乌龟模拟器变成绿色?答案有的。
ros2 的run 指令支持下面这种
骚操作。ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>关闭我们的乌龟模拟器,使用下面的指令重新运行
ros2 run turtlesim turtlesim_node --ros-args --params-file ./turtlesim.yaml
可以看到一上来就时绿了的模拟器。
5.总结
能不加班尽量别加班,尤其是周一,因为周末比上班更累