第8章机器人建模,入门篇,第4节
-
你好,我在学习8.4章,使用JointStates控制RVIZ2关节,编译成功,运行报错如下:
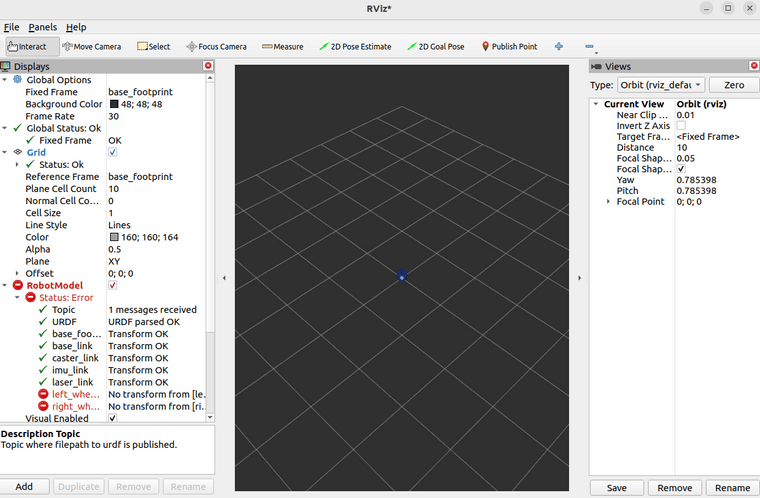
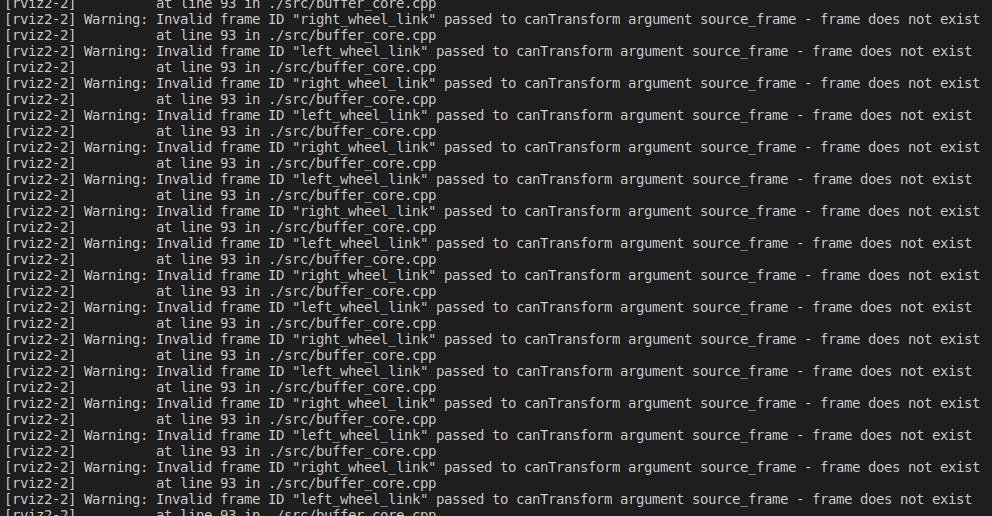
大概的意思是显示我左右轮子没有转换成功。请问是什么原因? -
@849282206 你可以发一下你的urdf文件吗?
-
@杜守钰 ```
code_text<?xml version="1.0"?> <robot name="fishbot"> <!-- base link --> <link name="base_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <cylinder length="0.12" radius="0.10"/> </geometry> <material name="blue"> <color rgba="0.1 0.1 1.0 0.5" /> </material> </visual> </link> <!-- laser link --> <link name="laser_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.02" radius="0.02"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <!-- laser joint --> <joint name="laser_joint" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0.075" /> </joint> <link name="imu_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <box size="0.02 0.02 0.02"/> </geometry> </visual> </link> <!-- imu joint --> <joint name="imu_joint" type="fixed"> <parent link="base_link" /> <child link="imu_link" /> <origin xyz="0 0 0.02" /> </joint> <link name="left_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <cylinder length="0.04" radius="0.032"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <joint name="left_wheel_joint" type="continuous"> <parent link="base_link" /> <child link="left_wheel_link" /> <origin xyz="-0.02 0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <link name="right_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <cylinder length="0.04" radius="0.032"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <joint name="right_wheel_joint" type="continuous"> <parent link="base_link" /> <child link="right_wheel_link" /> <origin xyz="-0.02 -0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> <link name="caster_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <sphere radius="0.016"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <joint name="caster_joint" type="fixed"> <parent link="base_link" /> <child link="caster_link" /> <origin xyz="0.06 0.0 -0.076" /> <axis xyz="0 1 0" /> </joint> <!-- Robot Footprint --> <link name="base_footprint"/> <joint name="base_joint" type="fixed"> <parent link="base_footprint"/> <child link="base_link"/> <origin xyz="0.0 0.0 0.076" rpy="0 0 0"/> </joint> </robot> -
@杜守钰
问题解决了,我没有运行 rotate_wheel 节点
我以为只需要launch,会自动启动所有节点。不太明白内在逻辑。 -
@849282206 不应该啊。 我的urdf 和你的基本一样。 我 launch 的 时候没有报错。
你 要不试试 从这边个复制一份 urdf https://raw.githubusercontent.com/fishros/fishbot/master/src/fishbot_description/urdf/fishbot_base.urdf 看看还报不报错?
-
@杜守钰 ``` urdf应该没问题,我的launch文件中没有将rotate_wheel加入,所以加入了下面这段,再运行launch就行了。
rotate_fishbot_wheel_node = Node(
package='fishbot_description',
executable='rotate_wheel',
arguments=[urdf_model_path]
)