@2483057163 错误提示说:你有2个package的名字是一样的。
所以你要把其中的一个名字给改掉。
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
杜守钰 发布的最佳帖子
-
RE: 修改vscode代码后如何进行重新编译,使用colcon build后报错发布在 综合问题
杜守钰 发布的最新帖子
-
RE: Ubuntu电脑端编译工作空间发布在 综合问题
- sudo apt-get install ros-你的ros版本-nav2-bringup,
比如 sudo apt-get install ros-humble-nav2-bringup - 从源码安装,可以参考 http://d2lros2foxy.fishros.com/?error=redirect_uri_mismatch&error_description=The+redirect_uri+MUST+match+the+registered+callback+URL+for+this+application.&error_uri=https%3A%2F%2Fdocs.github.com%2Fapps%2Fmanaging-oauth-apps%2Ftroubleshooting-authorization-request-errors%2F%23redirect-uri-mismatch#/humble/chapt11/get_started/1.Nav2导航框架介绍
- sudo apt-get install ros-你的ros版本-nav2-bringup,
-
RE: 修改vscode代码后如何进行重新编译,使用colcon build后报错发布在 综合问题
@2483057163 错误提示说:你有2个package的名字是一样的。
所以你要把其中的一个名字给改掉。 -
RE: Message Filter dropping message发布在 ROS2
@3110379921 请问你是使用static tf 去发布 camera_optical_frame 到 base_link(或者其他的joint) 的 tf 关系吗?
还有, 你能不能跑以下 ros2 run tf2_tools view_frames,看一下tf 树的关系对不对
-
RE: ROS2在服务和话题通讯时,点云和图像等信息传递时的通讯延迟发布在 ROS2
@RongJC
根据我所理解
目前好像(humble 和以下 )
只支持 c++ API ( https://docs.ros.org/en/humble/The-ROS2-Project/Features.html ) -
RE: 安装了ros+docker后 环境里很多package都没有,比如gedit、vim等,而且用apt-get install也下载不了;另外在系统中安装了ompl后,进入ros环境中编译功能包找不到ompl所在位置,不知道该怎么弄了发布在 一键安装
@420279604 在docker 中使用 apt-get install 之前要
RUN sudo apt-get update RUN sudo apt-get install -y software-properties-common RUN sudo apt-get install -y git RUN sudo add-apt-repository universe RUN sudo apt-get install -y python3-pip .... -
rviz2 在 odom 无法显示 pointcloud2 的消息发布在 ROS2
step to reproduce:
- ros2 launch fishbot_description gazebo.launch.py
- ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 base_link camera_link
- launch realsense camera
problem:
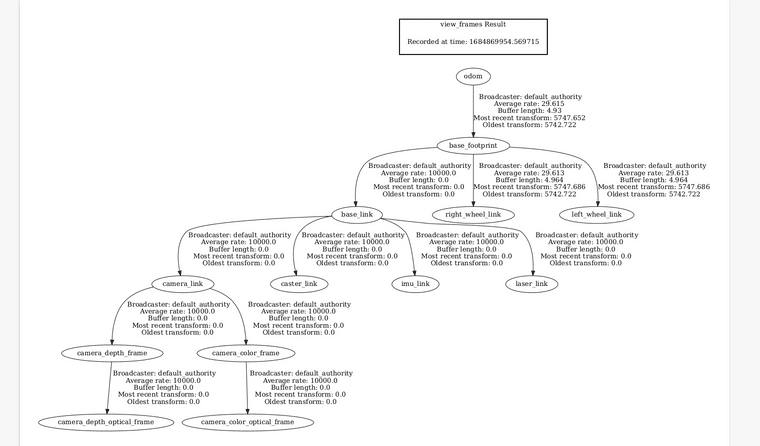
目前是 在 rviz2 中, 如果我 把 globalOption 底下的 fixed_frame 设置为 base_link 时, 我可以看到 摄像头的 pointcloud 数据(Figure 1)但如果我设置为 odom 时, 就无法显示 pointcloud 的数据(Figure 2)
我尝试了 用 view_frame 去确认了 tf tree 的关系(Figure 3),发现有这个transform的结果。
所以我不知道错在哪里了。 请各位大佬帮忙看看。
Figure1
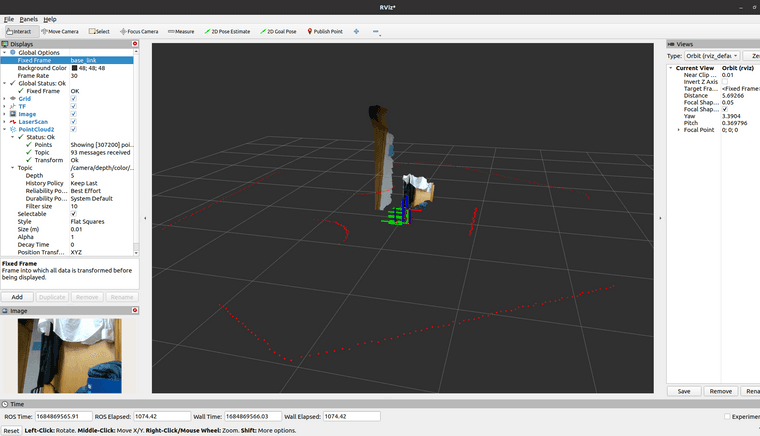
Figure 2
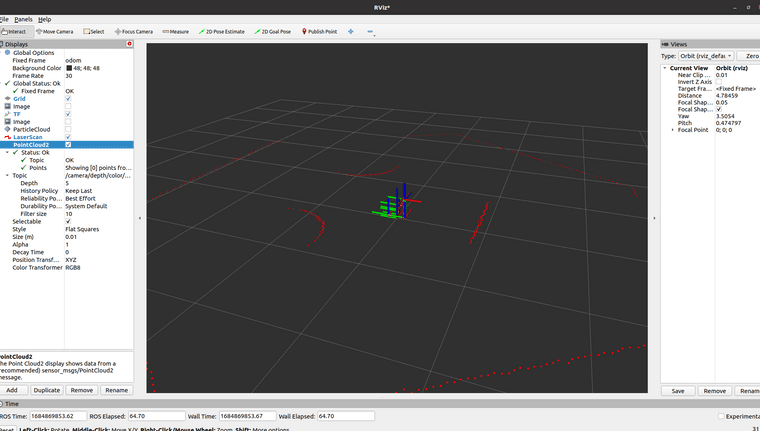 Figure 3
Figure 3Figure 3