我在fishbot导航中加载了自己的地图,但是无法设置初始点和目标点(及点击没有反应),有以下警告:
Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
,请问应该要怎么解决。
我开了1.putty,运行雷达程序
2.开agent
3.开启bring..
4.开启rviz2
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1991623683 发布的最新帖子
-
手持雷达建图发布在 综合问题
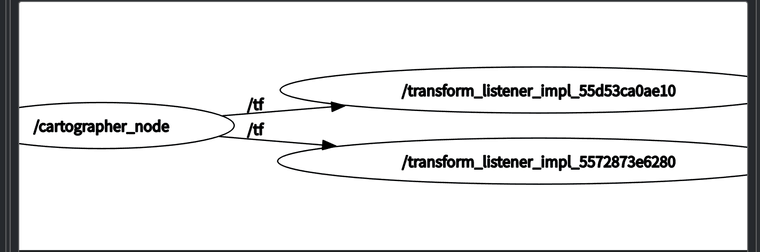
我希望实现手持雷达建图,首先编译运行雷达:roslaunch rplidar_ros view_rplidar_a2m8.launch,然后根据https://link.zhihu.com/?target=https%3A//mp.weixin.qq.com/s%3F__biz%3DMzkzMzI2MTU2Nw%3D%3D%26mid%3D2247487386%26idx%3D1%26sn%3D0f9de6257c35ff843582c3ad9e3144f2%26chksm%3Dc24e760af539ff1c84afbbbd52013732d4f8aa9c7a346cdd01231849fe24660101ecdfc9ee9b%26token%3D895124457%26lang%3Dzh_CN%23rd,该链接内容,修改frame_id = laser(是我自己雷达ID),然后编译运行,cartographer_pure_laser.launch.py,为什么无法显示地图,出现以下画面:

请问是哪里出现了问题吗? -
The passed service type is invalid发布在 综合问题
再用无线通信实现example14时,我按照步骤:
1.colcon build
2.连接开发板,编译下载
3.打开终端启动agent

4.进入extra_packages,source环境

5.显示nihao

出现了The passed service type is invalid错误,请问应该怎么解决?
 ,
,
 ,显示进程被杀,怎么解决
,显示进程被杀,怎么解决 ,请问是处于什么原因
,请问是处于什么原因 ,请问是什么问题
,请问是什么问题