@1685256511 试一下
sudo apt install --reinstall gcc g++
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
杜守钰 发布的帖子
-
RE: Ubuntu电脑端编译工作空间发布在 综合问题
- sudo apt-get install ros-你的ros版本-nav2-bringup,
比如 sudo apt-get install ros-humble-nav2-bringup - 从源码安装,可以参考 http://d2lros2foxy.fishros.com/?error=redirect_uri_mismatch&error_description=The+redirect_uri+MUST+match+the+registered+callback+URL+for+this+application.&error_uri=https%3A%2F%2Fdocs.github.com%2Fapps%2Fmanaging-oauth-apps%2Ftroubleshooting-authorization-request-errors%2F%23redirect-uri-mismatch#/humble/chapt11/get_started/1.Nav2导航框架介绍
- sudo apt-get install ros-你的ros版本-nav2-bringup,
-
RE: 修改vscode代码后如何进行重新编译,使用colcon build后报错发布在 综合问题
@2483057163 错误提示说:你有2个package的名字是一样的。
所以你要把其中的一个名字给改掉。 -
RE: Message Filter dropping message发布在 ROS2
@3110379921 请问你是使用static tf 去发布 camera_optical_frame 到 base_link(或者其他的joint) 的 tf 关系吗?
还有, 你能不能跑以下 ros2 run tf2_tools view_frames,看一下tf 树的关系对不对
-
RE: ROS2在服务和话题通讯时,点云和图像等信息传递时的通讯延迟发布在 ROS2
@RongJC
根据我所理解
目前好像(humble 和以下 )
只支持 c++ API ( https://docs.ros.org/en/humble/The-ROS2-Project/Features.html ) -
RE: 安装了ros+docker后 环境里很多package都没有,比如gedit、vim等,而且用apt-get install也下载不了;另外在系统中安装了ompl后,进入ros环境中编译功能包找不到ompl所在位置,不知道该怎么弄了发布在 一键安装
@420279604 在docker 中使用 apt-get install 之前要
RUN sudo apt-get update RUN sudo apt-get install -y software-properties-common RUN sudo apt-get install -y git RUN sudo add-apt-repository universe RUN sudo apt-get install -y python3-pip .... -
rviz2 在 odom 无法显示 pointcloud2 的消息发布在 ROS2
step to reproduce:
- ros2 launch fishbot_description gazebo.launch.py
- ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 base_link camera_link
- launch realsense camera
problem:
目前是 在 rviz2 中, 如果我 把 globalOption 底下的 fixed_frame 设置为 base_link 时, 我可以看到 摄像头的 pointcloud 数据(Figure 1)但如果我设置为 odom 时, 就无法显示 pointcloud 的数据(Figure 2)
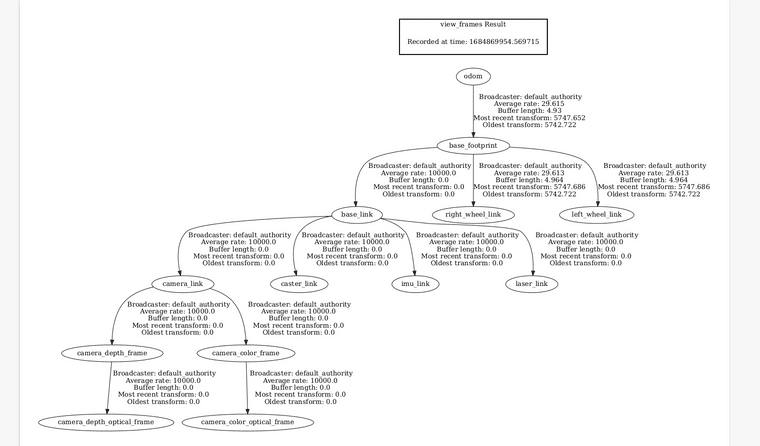
我尝试了 用 view_frame 去确认了 tf tree 的关系(Figure 3),发现有这个transform的结果。
所以我不知道错在哪里了。 请各位大佬帮忙看看。
Figure1
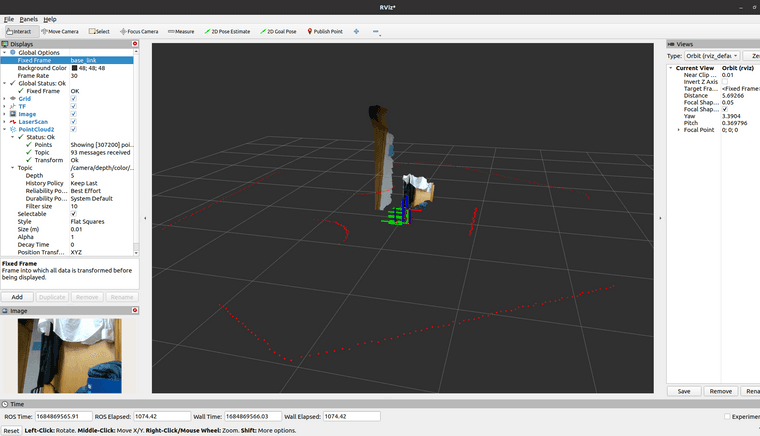
Figure 2
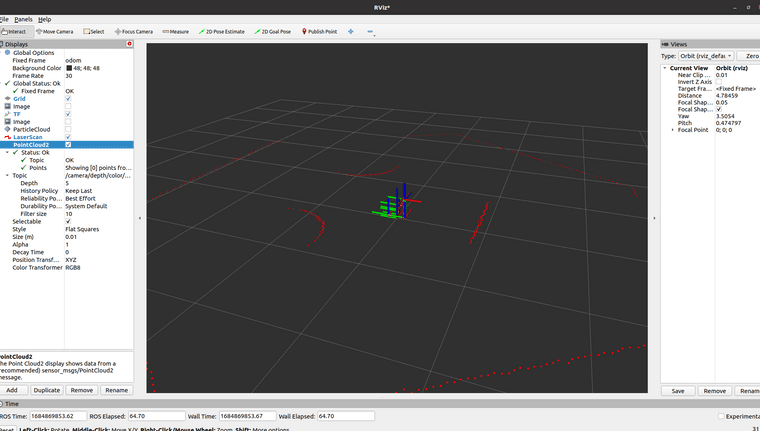 Figure 3
Figure 3Figure 3
-
RE: 在docker中安装ros后gazebo无法调用显卡发布在 综合问题
@守 以
如果想在docker 中用 gazebo 的 话
- 在 Dockerfile 中 加一句
RUN sudo apt install -y ros-<version>-desktop
- 以下是我的 launch.sh
xhost local:root
XAUTH=/tmp/.docker.xauth
docker run -it
--name=ros2_galactic
--env="DISPLAY=$DISPLAY"
--env="QT_X11_NO_MITSHM=1"
--volume="/tmp/.X11-unix :/tmp/.X11-unix:rw"
--env="XAUTHORITY=$XAUTH"
--volume="$XAUTH:$XAUTH"
--net=host
--ipc=host --pid=host -v /dev:/dev
--security-opt apparmor=unconfined
--privileged
r2_galactic:latest
bash -
ComposableNode 在设定 use_sim_time 不发布任何消息发布在 ROS2
phidget_spatial 是一款IMU
我根据他们官方的launch file https://github.com/ros-drivers/phidgets_drivers/blob/galactic/phidgets_spatial/launch/spatial-launch.py 和 https://docs.ros.org/en/foxy/How-To-Guides/Launching-composable-nodes.html 的第2个例子重构了一下launch file。代码如下:
import launch from launch_ros.actions import ComposableNodeContainer, LoadComposableNodes, Node from launch_ros.descriptions import ComposableNode from ament_index_python.packages import get_package_share_directory import os def generate_launch_description(): container = Node( name='phidget_container', namespace='', package='rclcpp_components', executable='component_container', output='both', ) load_composable_nodes = LoadComposableNodes( target_container='phidget_container', composable_node_descriptions=[ ComposableNode( package='phidgets_spatial', plugin='phidgets::SpatialRosI', name='phidgets_spatial', parameters=[{'use_sim_time': True}], ), ], ) return launch.LaunchDescription([ container, load_composable_nodes, ])现在的问题是, 如果我把 ‘parameters ....’ 那一行注释掉,可以正常运行, 会发布消息。
但如果我设置 use_sim_time, 这个composableNode 不会在对应的 topic上发布任何消息。Things I have tried:
- subscribe to /clock, 确保gazebo 向这个话题发布消息
-
Nav2 自动 launch AMCL发布在 Nav2
版本: galactic, ubuntun 20.04
我根据 @小鱼的教程跑nav2 的仿真。https://fishros.com/d2lros2/#/humble/chapt11/get_started/3.使用FishBot进行自主导航
但我根据我project的需求,不设置 AMCL 在我的fishbot_navigation2.yaml 文件里面。
但奇怪的是,当我launch我的 nav2时,会给我报AMCL的错误。并且我还可以通过 以下的CLI看到AMCL node, 但我并没有在我的nav2 yaml文件里面设置它。
shouyu@shouyu-Nitro-AN515-55:~/nav2_ws$ ros2 node list WARNING: Be aware that are nodes in the graph that share an exact name, this can have unintended side effects. /amcl /amcl_rclcpp_node /bt_navigator /bt_navigatornavigate_through_poses_rclcpp_node /bt_navigatornavigate_to_pose_rclcpp_node /controller_server /controller_server_rclcpp_node /depth_camera_controller /diff_drive /ekf_filter_node /gazebo /global_costmap/global_costmap /global_costmap/global_costmap_rclcpp_node /global_costmap_client /imu_plugin /laserscan /lifecycle_manager_localization /lifecycle_manager_navigation /local_costmap/local_costmap /local_costmap/local_costmap_rclcpp_node /local_costmap_client /map_server /planner_server /planner_server_rclcpp_node /recoveries_server /recoveries_server_rclcpp_node /robot_state_publisher /rviz2 /rviz2 /rviz2 /rviz2 /static_transform_publisher_DBYuZ8TucIxiZHPt /transform_listener_impl_556de7c8e660 /transform_listener_impl_557007e5afc0 /transform_listener_impl_558e16141920 /transform_listener_impl_56407f189a40 /transform_listener_impl_7f071401e460 /transform_listener_impl_7f54040125f0 /waypoint_follower shouyu@shouyu-Nitro我已经确认我的路径是指向对应的 yaml 文件。
以下是我的yaml文件
bt_navigator: ros__parameters: use_sim_time: True global_frame: map robot_base_frame: base_link odom_topic: /odom bt_loop_duration: 10 default_server_timeout: 20 enable_groot_monitoring: True groot_zmq_publisher_port: 1666 groot_zmq_server_port: 1667 # 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults: # nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml # nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml # They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2. plugin_lib_names: - nav2_compute_path_to_pose_action_bt_node - nav2_compute_path_through_poses_action_bt_node - nav2_follow_path_action_bt_node - nav2_back_up_action_bt_node - nav2_spin_action_bt_node - nav2_wait_action_bt_node - nav2_clear_costmap_service_bt_node - nav2_is_stuck_condition_bt_node - nav2_goal_reached_condition_bt_node - nav2_goal_updated_condition_bt_node - nav2_initial_pose_received_condition_bt_node - nav2_reinitialize_global_localization_service_bt_node - nav2_rate_controller_bt_node - nav2_distance_controller_bt_node - nav2_speed_controller_bt_node - nav2_truncate_path_action_bt_node - nav2_goal_updater_node_bt_node - nav2_recovery_node_bt_node - nav2_pipeline_sequence_bt_node - nav2_round_robin_node_bt_node - nav2_transform_available_condition_bt_node - nav2_time_expired_condition_bt_node - nav2_distance_traveled_condition_bt_node - nav2_single_trigger_bt_node - nav2_is_battery_low_condition_bt_node - nav2_navigate_through_poses_action_bt_node - nav2_navigate_to_pose_action_bt_node - nav2_remove_passed_goals_action_bt_node - nav2_planner_selector_bt_node - nav2_controller_selector_bt_node - nav2_goal_checker_selector_bt_node bt_navigator_rclcpp_node: ros__parameters: use_sim_time: True controller_server: ros__parameters: use_sim_time: True controller_frequency: 20.0 min_x_velocity_threshold: 0.001 min_y_velocity_threshold: 0.5 min_theta_velocity_threshold: 0.001 failure_tolerance: 0.3 progress_checker_plugin: "progress_checker" goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker" controller_plugins: ["FollowPath"] # Progress checker parameters progress_checker: plugin: "nav2_controller::SimpleProgressChecker" required_movement_radius: 0.5 movement_time_allowance: 10.0 # Goal checker parameters #precise_goal_checker: # plugin: "nav2_controller::SimpleGoalChecker" # xy_goal_tolerance: 0.25 # yaw_goal_tolerance: 0.25 # stateful: True general_goal_checker: stateful: True plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.25 yaw_goal_tolerance: 0.25 # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.26 max_vel_y: 0.0 max_vel_theta: 1.0 min_speed_xy: 0.0 max_speed_xy: 0.26 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 3.2 decel_lim_x: -2.5 decel_lim_y: 0.0 decel_lim_theta: -3.2 vx_samples: 20 vy_samples: 5 vtheta_samples: 20 sim_time: 1.7 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.25 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0 controller_server_rclcpp_node: ros__parameters: use_sim_time: True local_costmap: local_costmap: ros__parameters: update_frequency: 10.0 publish_frequency: 10.0 global_frame: odom robot_base_frame: base_link use_sim_time: True rolling_window: true width: 3 height: 3 resolution: 0.05 footprint: "[ [0.21, 0.195], [0.21, -0.195], [-0.21, -0.195], [-0.21, 0.195] ]" plugins: ["obstacle_layer", "inflation_layer"] inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 3.0 inflation_radius: 0.55 obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" raytrace_max_range: 3.0 raytrace_min_range: 0.0 obstacle_max_range: 2.5 obstacle_min_range: 0.0 static_layer: map_subscribe_transient_local: True always_send_full_costmap: True local_costmap_client: ros__parameters: use_sim_time: True local_costmap_rclcpp_node: ros__parameters: use_sim_time: True global_costmap: global_costmap: ros__parameters: update_frequency: 1.0 publish_frequency: 1.0 global_frame: map robot_base_frame: base_link use_sim_time: True robot_radius: 0.3 resolution: 0.05 track_unknown_space: false static_map: false rolling_window: false width: 10 height: 10 origin_x: -5.0 origin_y: -5.0 track_unknown_space: true plugins: ["static_layer", "obstacle_layer", "inflation_layer"] obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" raytrace_max_range: 3.0 raytrace_min_range: 0.0 obstacle_max_range: 2.5 obstacle_min_range: 0.0 static_layer: plugin: "nav2_costmap_2d::StaticLayer" map_subscribe_transient_local: True inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 3.0 inflation_radius: 0.55 always_send_full_costmap: True global_costmap_client: ros__parameters: use_sim_time: True global_costmap_rclcpp_node: ros__parameters: use_sim_time: True map_server: ros__parameters: use_sim_time: True yaml_filename: "/home/shouyu/nav2_ws/src/fishbot/src/fishbot_navigation2/maps/fishbot_map.yaml" # map_saver: # ros__parameters: # use_sim_time: True # save_map_timeout: 5.0 # free_thresh_default: 0.25 # occupied_thresh_default: 0.65 # map_subscribe_transient_local: True planner_server: ros__parameters: expected_planner_frequency: 20.0 use_sim_time: True planner_plugins: ["GridBased"] GridBased: plugin: "nav2_navfn_planner/NavfnPlanner" tolerance: 0.5 use_astar: false allow_unknown: true planner_server_rclcpp_node: ros__parameters: use_sim_time: True recoveries_server: ros__parameters: costmap_topic: local_costmap/costmap_raw footprint_topic: local_costmap/published_footprint cycle_frequency: 10.0 recovery_plugins: ["spin", "backup", "wait"] spin: plugin: "nav2_recoveries/Spin" backup: plugin: "nav2_recoveries/BackUp" wait: plugin: "nav2_recoveries/Wait" global_frame: odom robot_base_frame: base_link transform_timeout: 0.1 use_sim_time: true simulate_ahead_time: 2.0 max_rotational_vel: 1.0 min_rotational_vel: 0.4 rotational_acc_lim: 3.2 robot_state_publisher: ros__parameters: use_sim_time: True waypoint_follower: ros__parameters: loop_rate: 20 stop_on_failure: false waypoint_task_executor_plugin: "wait_at_waypoint" wait_at_waypoint: plugin: "nav2_waypoint_follower::WaitAtWaypoint" enabled: True waypoint_pause_duration: 200 -
RE: Imu_filter_magdwick 在 ENU下的角度有问题发布在 ROS2
@杜守钰 我找到错误了。 我之前一直吧 IMU 的y-axis 当成 x-axis 来用。 所以会有90度的偏差。
-
RE: Imu_filter_magdwick 在 ENU下的角度有问题发布在 ROS2
@小鱼 那所以在ENU 格式下,yaw = 0应该时对应 北边吗? 所以这个https://answers.ros.org/question/364998/should-imu-frame-follow-the-red-east-green-north-and-blue-up-convention/时错的? 还是我英文理解的有问题?
-
Imu_filter_magdwick 在 ENU下的角度有问题发布在 ROS2
我 目前使用 Spatial 3/3/3 1024 的 一个 IMU
1
在启用 imu_filter_magdwick 这个 package 后, 当 我 调成 ENU 模式的时候, 我发现 当面向 东边时, yaw=-90. 面向 北边时, yaw=0.
但当我调成 NED 模式时, yaw=0 面向东, yaw=-90 面向北。
但根据我的理解, 我记得应该时反过来的。 在ENU模式下, 面向东面时, yaw = 0. 在NED时, 面向北边时, yaw = 0.
见: http://docs.ros.org/en/kinetic/api/robot_localization/html/preparing_sensor_data.html 和
https://answers.ros.org/question/364998/should-imu-frame-follow-the-red-east-green-north-and-blue-up-convention/是我理解错了吗?
请各位大佬指出我的错!imu_filter_magdwick 的 config
imu_filter: ros__parameters: stateless: false use_mag: true publish_tf: true # pueublish /odom to imu_link reverse_tf: false fixed_frame: "odom" constant_dt: 0.0 publish_debug_topics: false world_frame: "ned" gain: 0.1 zeta: 0.0 mag_bias_x: 0.0 mag_bias_y: 0.0 mag_bias_z: 0.0 orientation_stddev: 0.1 publish_debug_topics: true