[FishBot教程] 9.0.5. 雷达固件烧录及配置
-
9.0.5. 雷达固件烧录及配置
你好,我是小鱼,本节我们来学习如何对雷达的固件进行烧录、升级和配置,完成后我们可以实现手持雷达建图的效果。
硬件就是我们的FishBot雷达转接板和雷达各一块。

一、FishBot雷达转接板介绍
Fishbot雷达转接板主要作用是将雷达的数据通过Wifi网络转发出去,以时间雷达数据的无线传输功能。
FishBot转接板的工作模式有三种
- Flash模式,该模式下可以给转接板进行固件的升级和参数配置。
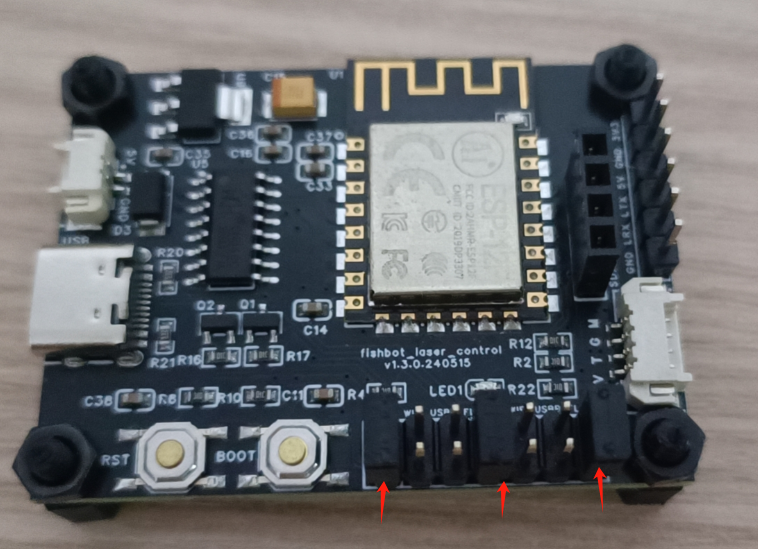
- Uart有线模式,该模式可以用于直接通过有线方式连接树莓派等主控板。
- Wifi无线模式,该模式将雷达数据通过无线方式传给上位机。
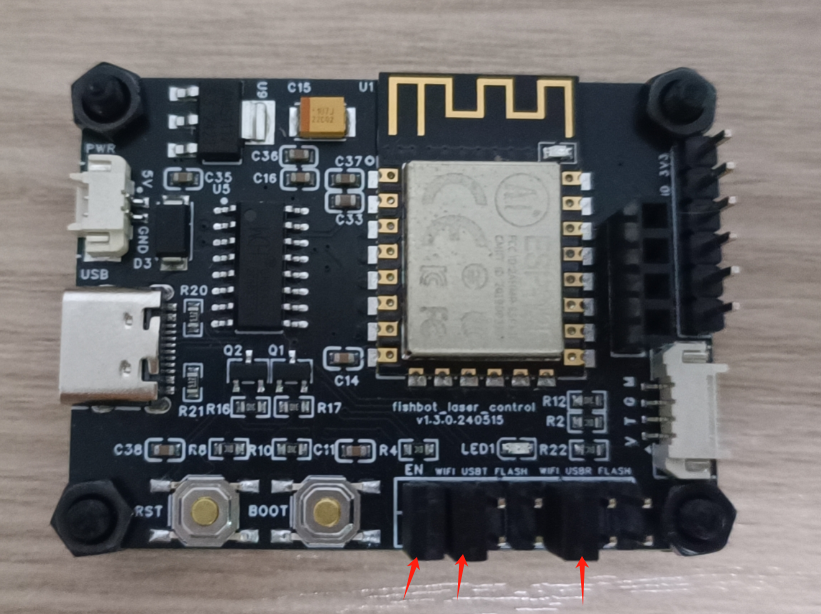
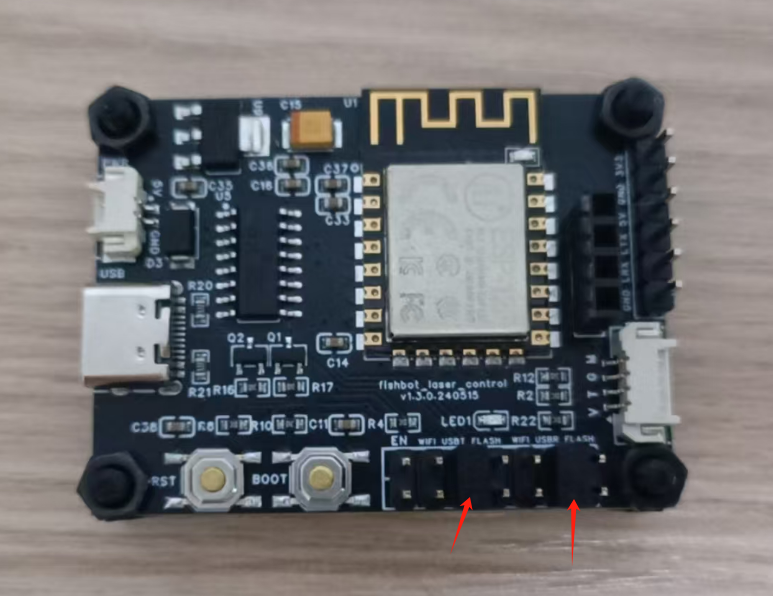
这三种工作模式可以根据板子上的标记调整跳线帽的位置进行切换。
当你第一次使用的时候需要将板子调节到Flash模式,该模式下我们可以对板子进行配置以及升级。二、烧录雷达固件
将跳线帽手动改到配置模式,如果你有OLED或者FISHBOT,可以将OLED其插在雷达板的OLED接口上,等升级配置结束后再拿走即可。
接着运行配置助手
点击刷新,查看是否正确加载到端口号,如没有端口号可能是驱动占用问题,请根据教程检查:https://blog.csdn.net/qq_27865227/article/details/125538516
接着手动将设备类型切换到FishBot雷达转接板

接着下方固件烧录会自动加载出最新的固件地址,点击一键下载即可完成对雷达转接板固件的更新。
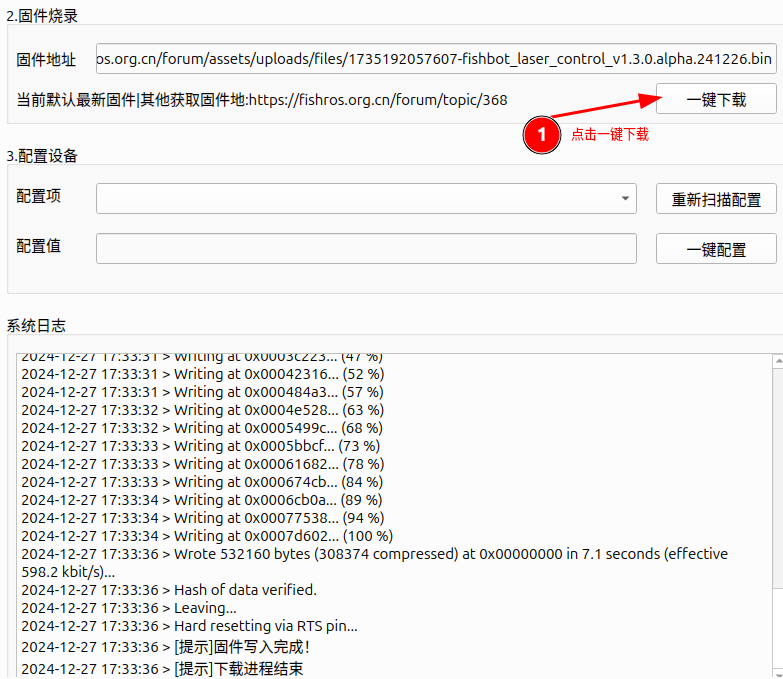
如果你想更换其他版本的固件,请到FishBot固件发布页面在对应的固件上右击,复制链接,粘贴到配置助手固件地址栏目再点击一键烧录即可。
如果你有OLED,此时屏幕应该亮起,并显示当前在配置模式,当前状态在等待配置。
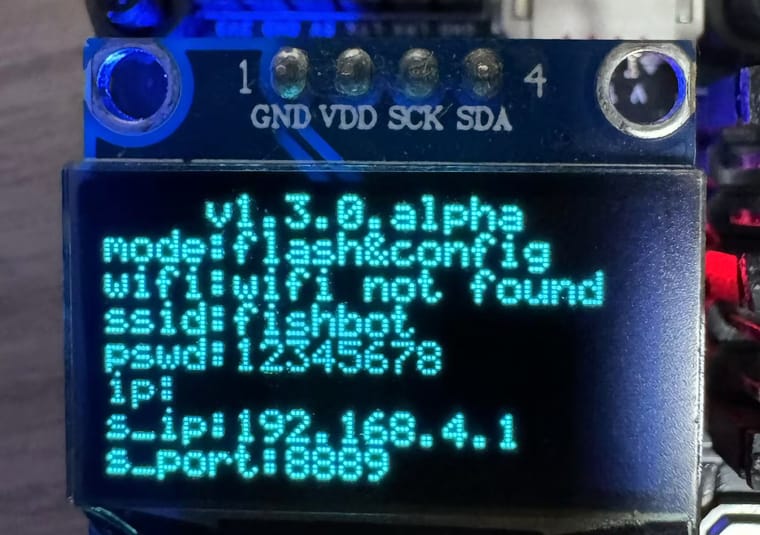
如果没有OLED可以观察板子上的蓝色LED灯,长亮表示在等待配置。
如果不在配置模式,请检查跳线帽是否在Flash模式。
三、配置转接板
在配置模式下,点击配置助手的重新扫描配置即可出现配置选项,

这里我们需要修改三个参数。
- wifi_ssid,当前机器人可以连接到的wifi用户名
- wifi_pswd,wifi密码
- server_ip,接收雷达数据的服务器端口地址
3.1配置wifi
这里你需要将wifi_ssid配置为你当前环境wifi名称(2.4G网络)

同样的操作步骤,将wifi_pswd配置为当前wifi对应的密码

3.2 配置服务IP
转接板要想将数据通过网络分享给我们的计算机,那么在计算机上就需要一个程序来接收数据,所以我们要指定接收数据的服务的IP地址——当前计算机的IP。
第一步是获取当前主机的IP地址
打开一个新的终端,输入ip a 看看电脑的ip地址,一般可以看到多个网卡的,此时可以忽略172(docker)和127(本地)开头的ip地址,剩下的一般就是我们要的ip地址,比如小鱼这里的就是192.168.1.102

接着配置server_ip
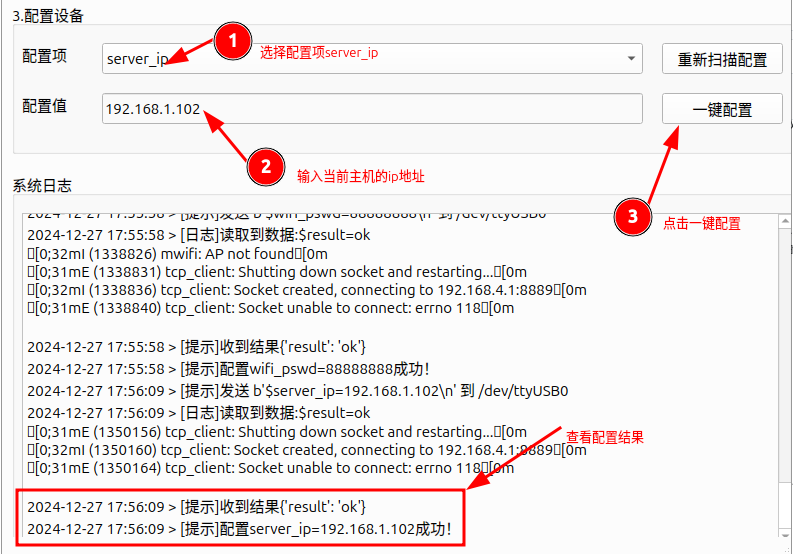
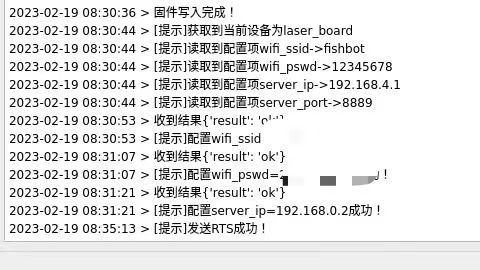
配置完成后,将跳线帽调整至wifi模式,现在可以从OLED上观察到目前的配置信息以及连接状态信息。
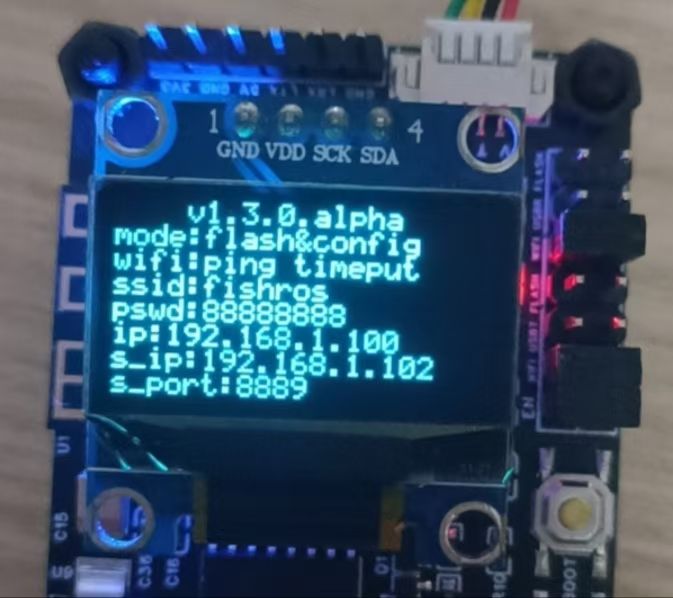
其中IP即转接板的IP地址,虽然wifi显示timeout了,不用担心,
在终端中输入下面的命令nc -l 8889就会收到雷达板的问候:
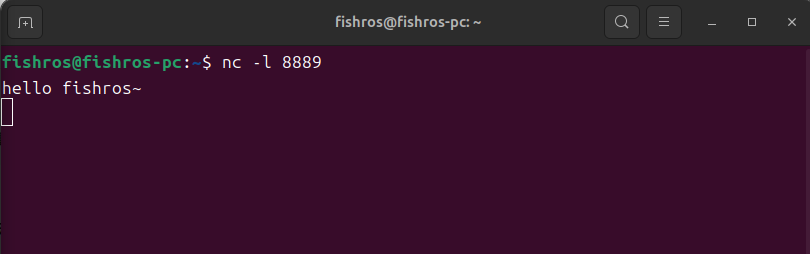
同时,OLED上会显示running,就说明我们的计算机在网络链路上和雷达转接板打通了。

四、总结
至此我们完成了雷达转接板的配置,该板除了作为雷达转接板之外,还可以作为串口转wifi即无线串口的功能,需要配合相关代码使用,有需要的朋友具体请见:https://www.fishros.org.cn/forum/topic/949/home/fishros/下载/default.jpeg/home/fishros/下载/cgi-bin_mmwebwx-bin_webwxgetmsgimg_&MsgID=6619457247387042247&skey=@crypt_a938da84_9b31fab9b08c9ace9dcdad46405e93b8&mmweb_appid=wx_webfilehelper.jpeg/home/fishros/下载/cgi-bin_mmwebwx-bin_webwxgetmsgimg_&MsgID=2765728739431586407&skey=@crypt_d03924ac_617b051763b5996ca572271c87d9dbcb&mmweb_appid=wx_webfilehelper.jpeg/home/fishros/下载/cgi-bin_mmwebwx-bin_webwxgetmsgimg_&MsgID=2670289916936594163&skey=@crypt_d03924ac_617b051763b5996ca572271c87d9dbcb&mmweb_appid=wx_webfilehelper.jpeg
-

雷达固件烧录和配置都正常,但wifi一直是wait connect,是不是wifi模块有问题呢 -
@张剑锋 WIFi是2.4G还是5G的,目前仅支持2,4G,另外注意核实密码
-
@小鱼 2.4G的,主控板能正常连接wifi
-
@张剑锋 尝试换一个热点试试,另外登录下后台看看,是否有限制之类的,也可以尝试重启下转接板
-
@小鱼 连手机热点可以连上,连wifi的话路由器后台是能看到有一个新接入的设备,但板上还是显示wait connect
-
@张剑锋 连接手机时可以转接板正常显示IP地址吗?
-
@小鱼 是的

-
@张剑锋 路由器是啥牌子的,路由器后台看到接入有给分配IP地址吗
-
@张剑锋 用的是个随身wifi,后台能看到分配的ip,但不能ping通
-
@张剑锋 随身wifi还没测试过,估计有不兼容问题。有没有路由器,笔记本的话电脑开个热点也行
-
@小鱼 在台式机上装的ubuntu
-
@小鱼 主控板是能正常连接的,明天搞个路由器回来试一下
-
@张剑锋 好勒,测试有问题可以直接反馈
-
@小鱼 谢谢大佬解答,有问题再请教

-
烧录的时候说芯片不对,怎么解决呀鱼哥
2023-04-08 07:37:37 > 准备从https://www.fishros.org.cn/forum/assets/uploads/files/1673413115955-fishbot_laser_control_v1.0.0.230111.bin下载固件到/dev/ttyUSB0对应芯片为esp8266
2023-04-08 07:37:37 > 准备从网址下载固件...
2023-04-08 07:37:39 >
2023-04-08 07:37:39 > --2023-04-08 07:37:36-- https://www.fishros.org.cn/forum/assets/uploads/files/1673413115955-fishbot_laser_control_v1.0.0.230111.bin
2023-04-08 07:37:39 > Resolving www.fishros.org.cn (www.fishros.org.cn)... 124.222.2.110
2023-04-08 07:37:39 > Connecting to www.fishros.org.cn (www.fishros.org.cn)|124.222.2.110|:443... connected.
2023-04-08 07:37:39 > HTTP request sent, awaiting response... 200 OK
2023-04-08 07:37:39 > Length: 532320 (520K) [application/octet-stream]
2023-04-08 07:37:39 > Saving to: ‘esp8266.bin’
2023-04-08 07:37:39 >
2023-04-08 07:37:39 > 固件下载完成!
2023-04-08 07:37:39 > 开始烧录固件...
2023-04-08 07:37:39 > esptool.py v4.4
2023-04-08 07:37:39 > Serial port /dev/ttyUSB0
2023-04-08 07:37:39 > Connecting....
2023-04-08 07:37:39 >
2023-04-08 07:37:39 > A fatal error occurred: This chip is ESP32 not ESP8266. Wrong --chip argument?
2023-04-08 07:37:39 >
2023-04-08 07:37:39 >
2023-04-08 07:37:39 > [错误]固件写入失败,请检查日志或重试。。。 -
@2251581333 在 [FishBot教程] 5. 雷达固件烧录及配置 中说:
A fatal error occurred: This chip is ESP32 not ESP8266. Wrong --chip argument?
设备类型选错了
-
鱼哥,雷达连接不上电脑怎么回事
PING 192.168.43.222 (192.168.43.222) 56(84) bytes of data.^C
--- 192.168.43.222 ping 统计 ---
已发送 571 个包, 已接收 0 个包, 100% 包丢失, 耗时 583658 毫秒 -
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
关于网络问题ping不通,小车连不上agent的解决 方案
核心要点:让小车可以ping通agent
操作方式如下:
虚拟机操作虚拟机一定修改为桥接模式。
笔记本电脑建议小车直接接入电脑2.4G热点注意:虚拟机为巧接模式,小车通过电脑热点接入时,此时虚拟机ping不通小车ip,但可以正常通信,原因是小车此时处于电脑的子网下。
实体机操作建议实体机通过网线连接路由器
建议小车通过wifi接入路由器
路由器双频合一的记得到路由器后台设置分开 -
@小鱼 在 [FishBot教程] 5. 雷达固件烧录及配置 中说:
@2251581333 在 [FishBot教程] 5. 雷达固件烧录及配置 中说:
A fatal error occurred: This chip is ESP32 not ESP8266. Wrong --chip argument?
设备类型选错了
我安装时,也出现这种状况,eps32?怎么处理?