@小鱼 ok,多谢鱼哥啦,我去装插件试一试
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
一只活跃的新手 发布的最新帖子
-
RE: jupyter新建python3文件终端报错,导入rclpy报错发布在 综合问题
@小鱼 用的动手学ros2教程https://fishros.com/d2lros2/#/,ros2,python版本是跟着教程一键安装的
这个教程前面都是用的vscode,是不是后面的内容还是foxy版本的没更新呀 -
RE: jupyter新建python3文件终端报错,导入rclpy报错发布在 综合问题
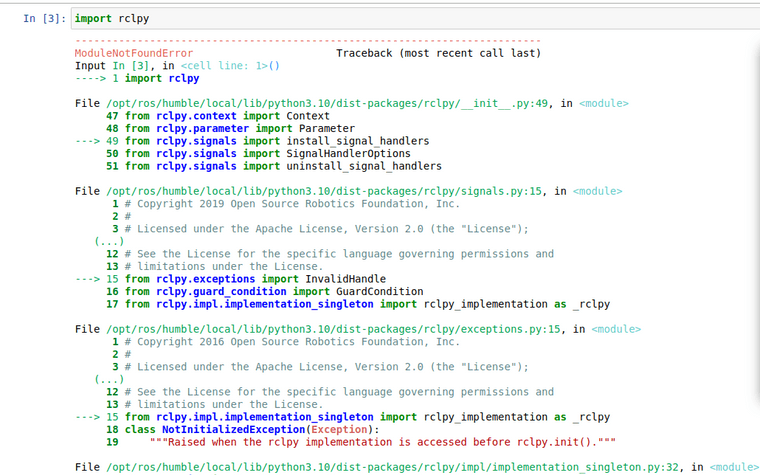
@小鱼 鱼哥,在终端输入python,然后import会报错
ModuleNotFoundError: No module named ‘rclpy._rclpy_pybind11’ -
RE: jupyter新建python3文件终端报错,导入rclpy报错发布在 综合问题
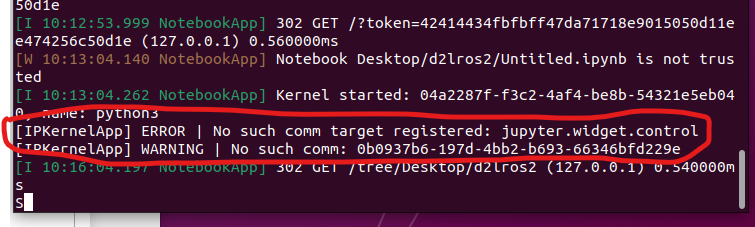
[IPKernelApp] ERROR | No such comm target registered: jupyter.widget.control [IPKernelApp] WARNING | No such comm: 0b0937b6-197d-4bb2-b693-66346bfd229eModuleNotFoundError: No module named 'rclpy._rclpy_pybind11' The C extension '/opt/ros/humble/lib/python3.10/site-packages/_rclpy_pybind11.cpython-38-x86_64-linux-gnu.so' isn't present on the system. Please refer to 'https://docs.ros.org/en/humble/Guides/Installation-Troubleshooting.html#import-failing-without-library-present-on-the-system' for possible solutions求大佬帮忙看下问题出在哪里,都是按照教程一步步来的