@790622044 没有,我们现在还是卡在这边
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2934775495 发布的最新帖子
-
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
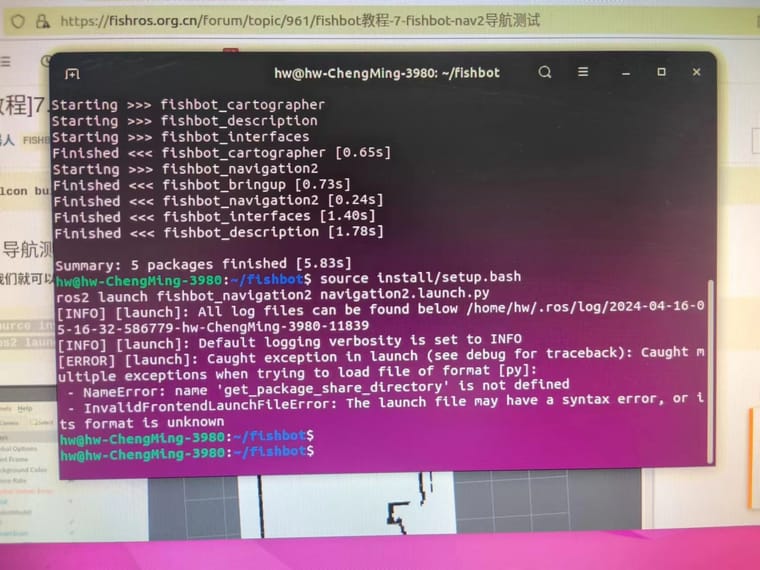
鱼哥,我这边跑导航测试那一步ros2 launch fishbot_navigation2 navigation2.launch.py的时候会出现这个问题,要怎么解决呢? -
串口识别问题发布在 综合问题
一开始装好机器人时是正常的,后面拆卸板子进行学习板单独的学习后不久就出现板子端口识别不到的问题。(有多次带电拔插那个LED显示屏模块过)。第一次发现异常是在用VScode的PIO模块上传程序时突然报错
最先开始是这样的报错页面
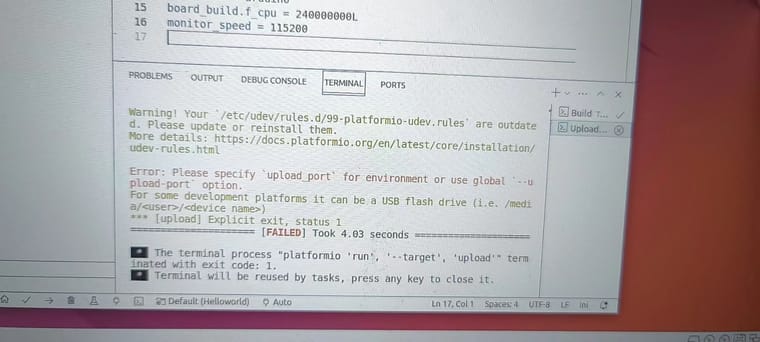
后来报错情况变成了这样
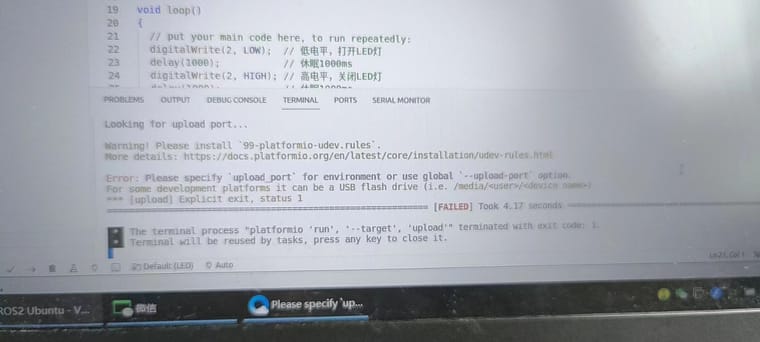
整体差别不大。
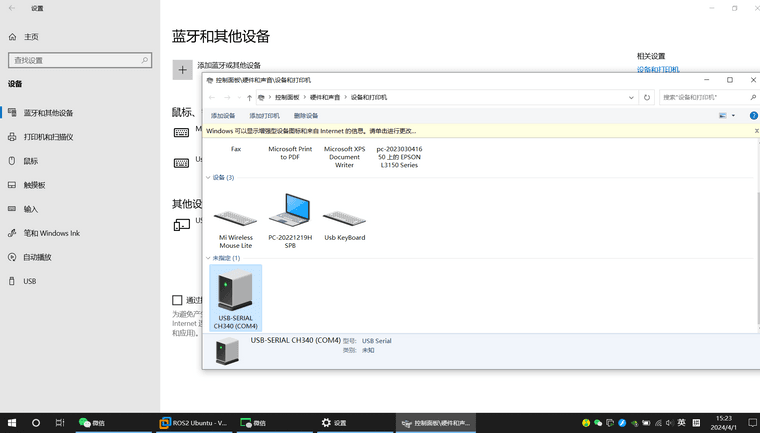
后来打开配置助手看看情况,发现找不到端口
终端输入lsusb
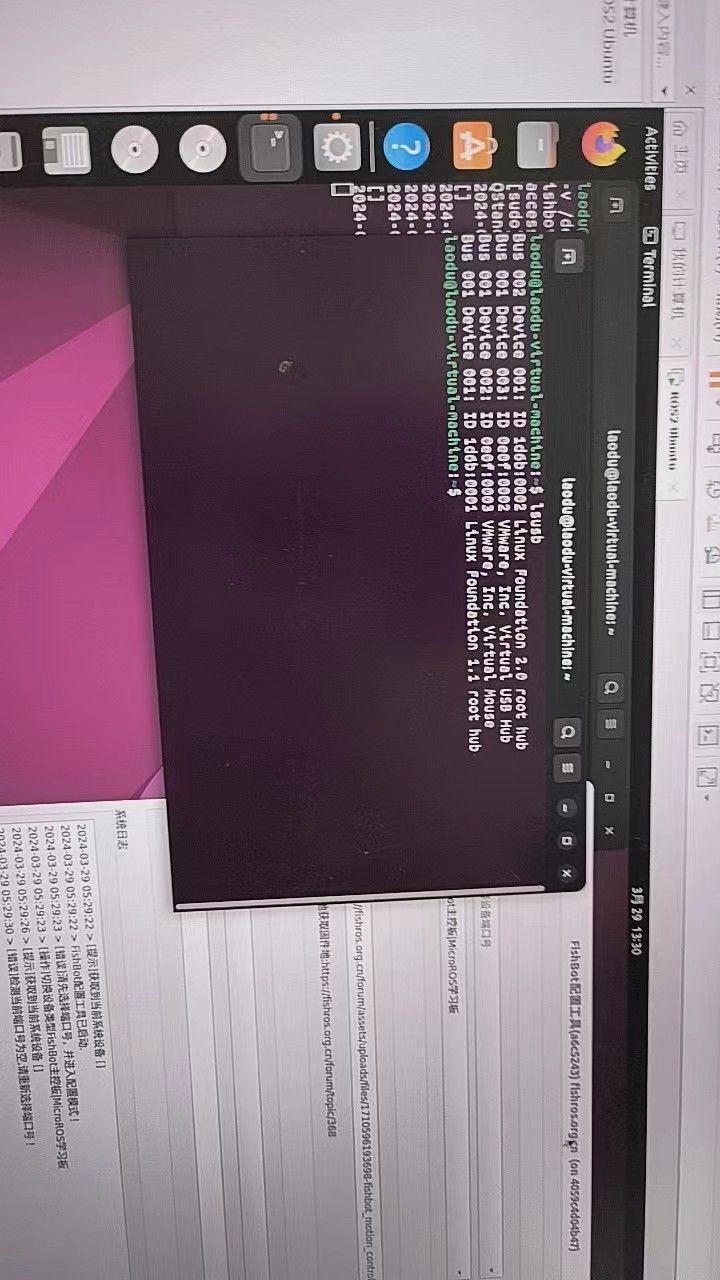
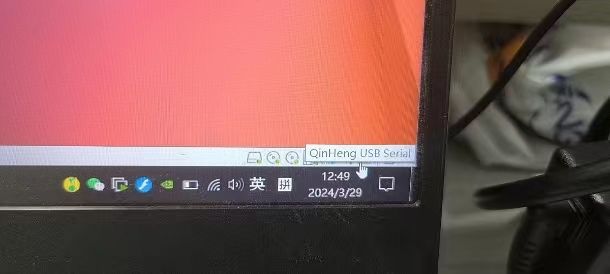
不会出现CH340的接口字样。但是插入板子后虚拟机右下角会显示USB Serial(插入板子时不会跳出接入设备进入电脑还是虚拟机页面,之前有设置默认接入虚拟机)
用的虚拟机,Ubuntu版本是22.04。docker,PIO,ros,rosdepc全都有装。关于社区的占用禁用以及卸载还有权限设置(临时非临时)的教程都有试过。也换过电脑,换过数据线(手机数据线)
PS:雷达板和学习板同时无法使用,都无法识别串口
 有看到,那现在怎么办
有看到,那现在怎么办