重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1910424496 发布的最新帖子
-
ros2编译通过,运行时rclcpp初始化报错发布在 机器人学
项目来源:ROS 2 Documentation — ROS 2 Documentation: Rolling documentation
遇到的问题:
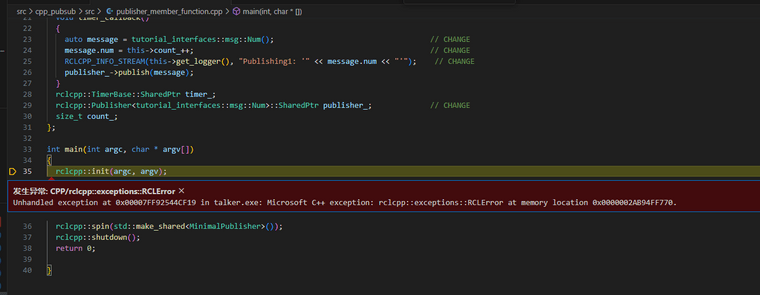
在使用ros官网的话题通讯代码编译通过后使用进行运行时,会在main函数的rclcpp::init(argc,argc)出现rclError异常,截图如下。
问题出现步骤:- 使用终端编译项目,编译成功
- 使用debug运行时会在rclcpp的初始化进行报错
软件环境
1 操作系统:Win10
2 C++标准版本:17
3 VS版本:VS2019(Visual C++,MSVC 14.29)
4 Python版本:3.8.3