@小鱼 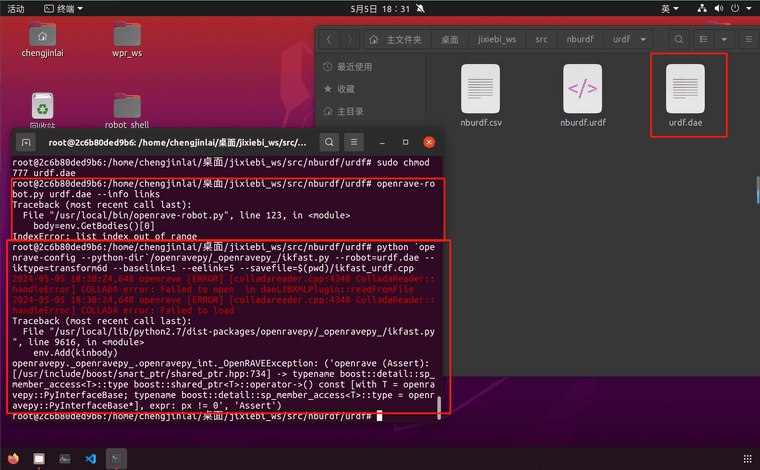
想请教下各位大佬,20版本用鱼哥的docker镜像配置ikfast插件,依赖都装了,编译没问题,dae文件也能生成,精度设的小数点后3位,但到生成ikfast代码时候会报错,然后我往前一步执行
openrave-robot.py urdf.dae --info links
查看链接关系也会报错,报错内容似乎是dae没加载进去,但我已经给chmod访问权限了,想了很久不知道啥原因,求大佬指教
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
3
3011986109 发布的最新帖子
-
RE: Moveit,IkFast运动学插件配置,最详细,没有之一发布在 机械臂运动规划