1 在win上
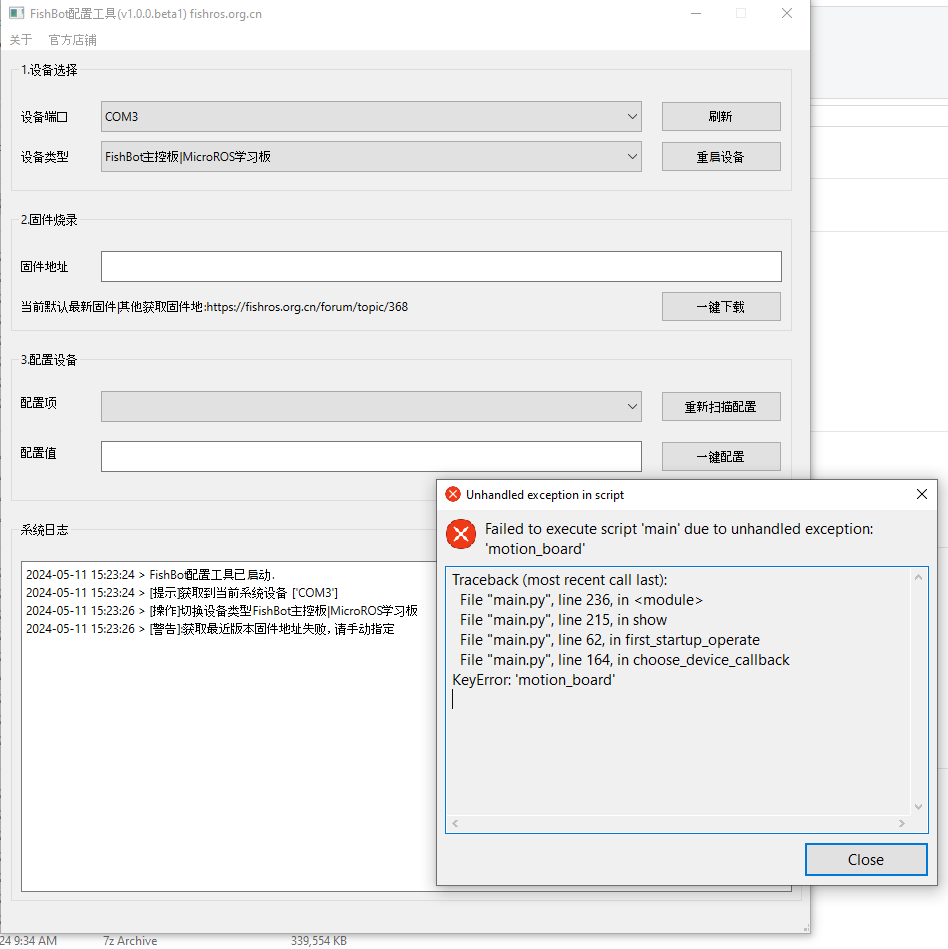
在Windows上运行报错的截图如下
2 在Linux上
在Ubuntu22.04里,我运行了release里最新版的,linux版和source版,但是都报同样的错误:
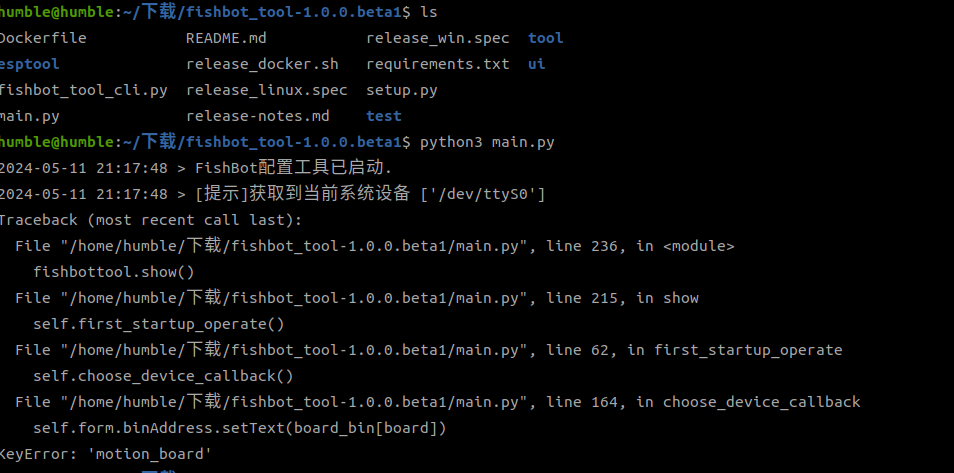
求解答,谢谢!
在Windows上运行报错的截图如下
在Ubuntu22.04里,我运行了release里最新版的,linux版和source版,但是都报同样的错误:
求解答,谢谢!
@小鱼
大佬,你好,根据你的回复,我重新安装了tool,但是无论在Windows上还是在linux上,都同时出现了相同的error。报错如下:
Traceback (most recent call last):
File "main.py", line 236, in <module>
File "main.py", line 215, in show
File "main.py", line 62, in first_startup_operate
File "main.py", line 164, in choose_device_callback
KeyError: 'motion_board'
尝试了很多,始终没找到解决方法,求解答,谢谢
你好,
我在安装“ FishBot配置助手及固件发布页”的时候遇到一些问题。
1. 我是ubuntu22.04 + humble, 然后人在海外(不知道有没有影响)
我在安装配置助手时,是下载了git里的fishbot_tool.v1.0.0.beta1.linux_amd64,然后把他放到虚拟机ubuntu22.04里解压的。
解压后,我运行运行命令 xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot_tool:v1.0.0.beta1 时:
他会闪现一下配置助手的界面,然后立马就消失了。
运行&报错结果:
cheng@cheng-virtual-machine:~$ xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot_tool:v1.0.0.beta1
access control disabled, clients can connect from any host
[sudo] password for cheng:
Detected locale "C" with character encoding "ANSI_X3.4-1968", which is not UTF-8.
Qt depends on a UTF-8 locale, and has switched to "C.UTF-8" instead.
If this causes problems, reconfigure your locale. See the locale(1) manual
for more information.
2024-04-29 10:31:58 > FishBot配置工具已启动.
2024-04-29 10:31:58 > [提示]获取到当前系统设备 ['/dev/ttyS0']
Traceback (most recent call last):
File "main.py", line 236, in <module>
File "main.py", line 215, in show
File "main.py", line 62, in first_startup_operate
File "main.py", line 164, in choose_device_callback
KeyError: 'motion_board'
[7] Failed to execute script 'main' due to unhandled exception!
2. 我也尝试运行:配置助手:xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20240219 python3 main.py 也报错了。
报错结果:
cheng@cheng-virtual-machine:~$ xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20240219 python3 main.py
access control disabled, clients can connect from any host
2024-04-29 10:37:33 > [提示]获取到当前系统设备 []
[]
Traceback (most recent call last):
File "/usr/local/lib/python3.10/dist-packages/urllib3/connectionpool.py", line 467, in _make_request
self._validate_conn(conn)
File "/usr/local/lib/python3.10/dist-packages/urllib3/connectionpool.py", line 1099, in _validate_conn
conn.connect()
File "/usr/local/lib/python3.10/dist-packages/urllib3/connection.py", line 653, in connect
sock_and_verified = _ssl_wrap_socket_and_match_hostname(
File "/usr/local/lib/python3.10/dist-packages/urllib3/connection.py", line 806, in ssl_wrap_socket_and_match_hostname
ssl_sock = ssl_wrap_socket(
File "/usr/local/lib/python3.10/dist-packages/urllib3/util/ssl.py", line 465, in ssl_wrap_socket
ssl_sock = ssl_wrap_socket_impl(sock, context, tls_in_tls, server_hostname)
File "/usr/local/lib/python3.10/dist-packages/urllib3/util/ssl.py", line 509, in _ssl_wrap_socket_impl
return ssl_context.wrap_socket(sock, server_hostname=server_hostname)
File "/usr/lib/python3.10/ssl.py", line 513, in wrap_socket
return self.sslsocket_class._create(
File "/usr/lib/python3.10/ssl.py", line 1100, in _create
self.do_handshake()
File "/usr/lib/python3.10/ssl.py", line 1371, in do_handshake
self._sslobj.do_handshake()
ssl.SSLCertVerificationError: [SSL: CERTIFICATE_VERIFY_FAILED] certificate verify failed: unable to get local issuer certificate (_ssl.c:1007)
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/usr/local/lib/python3.10/dist-packages/urllib3/connectionpool.py", line 793, in urlopen
response = self._make_request(
File "/usr/local/lib/python3.10/dist-packages/urllib3/connectionpool.py", line 491, in _make_request
raise new_e
urllib3.exceptions.SSLError: [SSL: CERTIFICATE_VERIFY_FAILED] certificate verify failed: unable to get local issuer certificate (_ssl.c:1007)
The above exception was the direct cause of the following exception:
Traceback (most recent call last):
File "/usr/local/lib/python3.10/dist-packages/requests/adapters.py", line 486, in send
resp = conn.urlopen(
File "/usr/local/lib/python3.10/dist-packages/urllib3/connectionpool.py", line 847, in urlopen
retries = retries.increment(
File "/usr/local/lib/python3.10/dist-packages/urllib3/util/retry.py", line 515, in increment
raise MaxRetryError(_pool, url, reason) from reason # type: ignore[arg-type]
urllib3.exceptions.MaxRetryError: HTTPSConnectionPool(host='fishros.org.cn', port=443): Max retries exceeded with url: /forum/api/v3/posts/2301 (Caused by SSLError(SSLCertVerificationError(1, '[SSL: CERTIFICATE_VERIFY_FAILED] certificate verify failed: unable to get local issuer certificate (_ssl.c:1007)')))
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/fishbot_tool/fishbot_tool/main.py", line 245, in <module>
fishbottool = FishBotTool()
File "/fishbot_tool/fishbot_tool/main.py", line 57, in init
self.choose_device_callback()
File "/fishbot_tool/fishbot_tool/main.py", line 175, in choose_device_callback
board_bin = get_version_data()
File "/fishbot_tool/fishbot_tool/data.py", line 13, in get_version_data
response = requests.get(version_info_url)
File "/usr/local/lib/python3.10/dist-packages/requests/api.py", line 73, in get
return request("get", url, params=params, **kwargs)
File "/usr/local/lib/python3.10/dist-packages/requests/api.py", line 59, in request
return session.request(method=method, url=url, **kwargs)
File "/usr/local/lib/python3.10/dist-packages/requests/sessions.py", line 589, in request
resp = self.send(prep, **send_kwargs)
File "/usr/local/lib/python3.10/dist-packages/requests/sessions.py", line 703, in send
r = adapter.send(request, **kwargs)
File "/usr/local/lib/python3.10/dist-packages/requests/adapters.py", line 517, in send
raise SSLError(e, request=request)
requests.exceptions.SSLError: HTTPSConnectionPool(host='fishros.org.cn', port=443): Max retries exceeded with url: /forum/api/v3/posts/2301 (Caused by SSLError(SSLCertVerificationError(1, '[SSL: CERTIFICATE_VERIFY_FAILED] certificate verify failed: unable to get local issuer certificate (_ssl.c:1007)')))
请大佬解答一下,谢谢。
我是ros2 humble系统, 我想要把相机坐标系下的物体点转换到地图坐标系下,但是一直转换失败。
我验证了相机坐标系和map之间是能够转换的,请问该如何把相机下的点转到map下呢?
主要就是: transformed_pose = do_transform_pose(pose_stamped, transform) 出错
import rclpy
from tf2_ros import Buffer, TransformListener
from tf2_ros.buffer_interface import BufferInterface
from tf2_geometry_msgs import do_transform_pose
from geometry_msgs.msg import PoseStamped
import tf_transformations
def main():
rclpy.init()
node = rclpy.create_node('tf2_listener')
tf_buffer = Buffer()
listener = TransformListener(tf_buffer, node)
# pose
pose_stamped = PoseStamped()
pose_stamped.header.frame_id = "camera"
pose_stamped.pose.position.x = 1.0
pose_stamped.pose.position.y = 2.0
pose_stamped.pose.position.z = 3.0
pose_stamped.pose.orientation.x = 0.0
pose_stamped.pose.orientation.y = 0.0
pose_stamped.pose.orientation.z = 0.0
pose_stamped.pose.orientation.w = 1.0
rclpy.spin_once(node, timeout_sec=1)
transform = tf_buffer.lookup_transform('base_link', 'camera', rclpy.time.Time())
print(transform)
transformed_pose = do_transform_pose(pose_stamped, transform)
print(transformed_pose)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
报错结果:
Traceback (most recent call last):
File "/home/humble/fishbot_ws/install/tflola/lib/tflola/test2", line 33, in <module>
sys.exit(load_entry_point('tflola', 'console_scripts', 'test2')())
File "/home/humble/fishbot_ws/build/tflola/tflola/test2.py", line 79, in main
transformed_pose = do_transform_pose(pose_stamped, transform)
File "/opt/ros/humble/local/lib/python3.10/dist-packages/tf2_geometry_msgs/tf2_geometry_msgs.py", line 352, in do_transform_pose
pose.position.x,
AttributeError: 'PoseStamped' object has no attribute 'position'
[ros2run]: Process exited with failure 1
请大家不吝赐教