@1071904412 谢谢哥
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
K
kwei_work 发布的最新帖子
-
ROS2中课程3.5.2中问题发布在 综合问题
1.问题描述
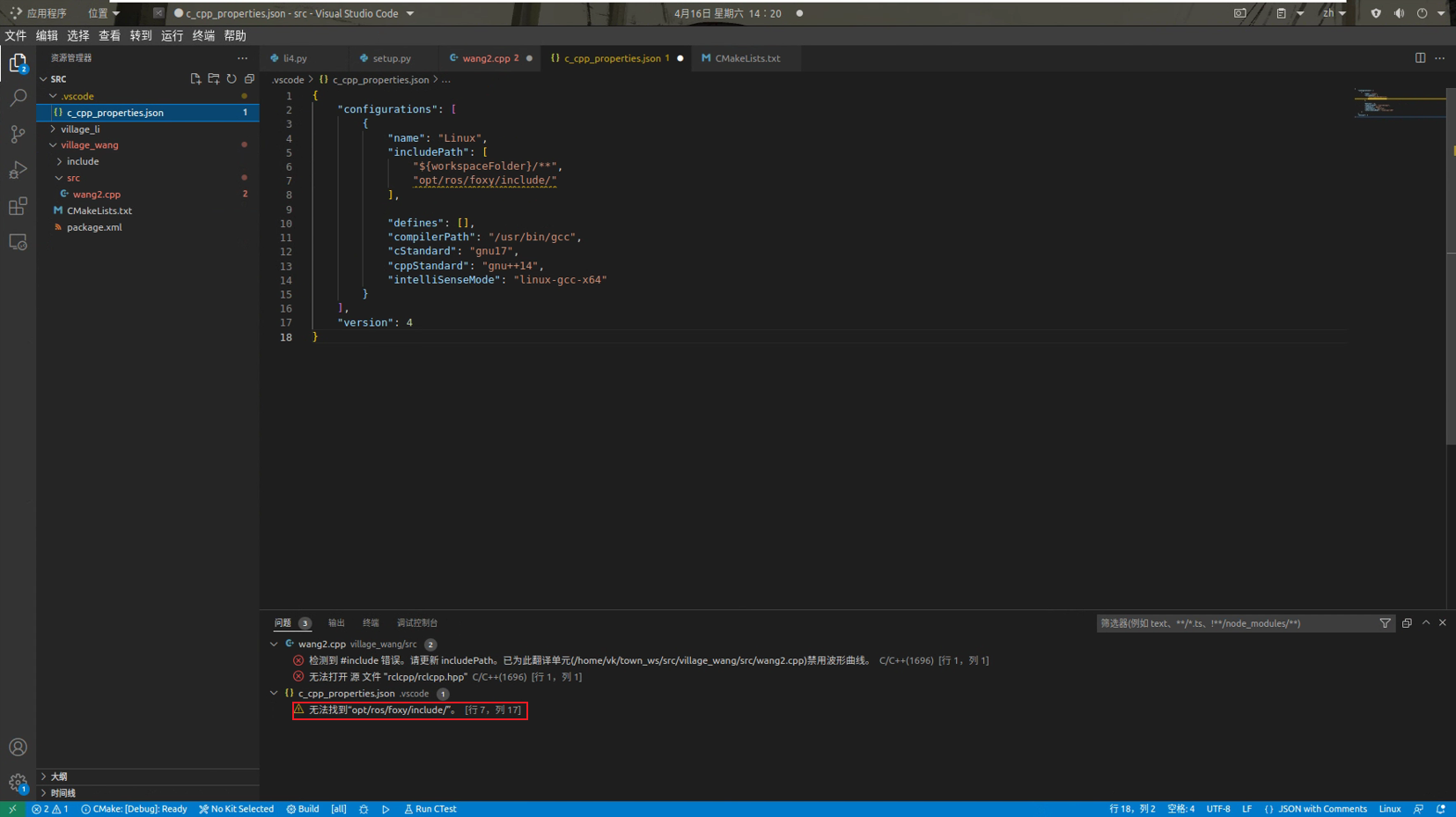
vscode中编写第一个C++例程头文件错误,错误显示为:
检测到#include错误,请更新includePath。
无法打开 源 文件 “rclcpp/rclcpp.hpp”
2.源码:#include "rclcpp/rclcpp.hpp" int main(int argc, char **argv) { rclcpp::init(argc, argv); /*产生一个Wang2的节点*/ auto node = std::make_shared<rclcpp::Node>("wang2"); // 打印一句自我介绍 RCLCPP_INFO(node->get_logger(), "大家好,我是单身狗wang2."); /* 运行节点,并检测退出信号*/ rclcpp::spin(node); rclcpp::shutdown(); return 0; }3.运行及打印