在ROS2运行以下launch命令时报错:
ros2 launch rm_vision_bringup vision_bringup.launch.py
报错如下:
[armor_tracker_node-4] [INFO] [1705997356.993650289] [armor_tracker]: Message Filter dropping message: frame 'camera_optical_frame' at time 1705997356.801 for reason 'discarding message because the queue is full'
已知armor_tracker功能包的功能为:
订阅识别节点发布的装甲板三维位置及机器人的坐标转换信息,将装甲板三维位置变换到指定惯性系(一般是以云台中心为原点,IMU 上电时的 Yaw 朝向为 X 轴的惯性系)下,然后将装甲板目标送入跟踪器中,输出跟踪机器人在指定惯性系下的状态。
订阅:
- 已识别到的装甲板
/detector/armors - 机器人的坐标转换信息
/tf/tf_static
发布:
- 最终锁定的目标
/tracker/target
使用RQT查看TF树,发现:
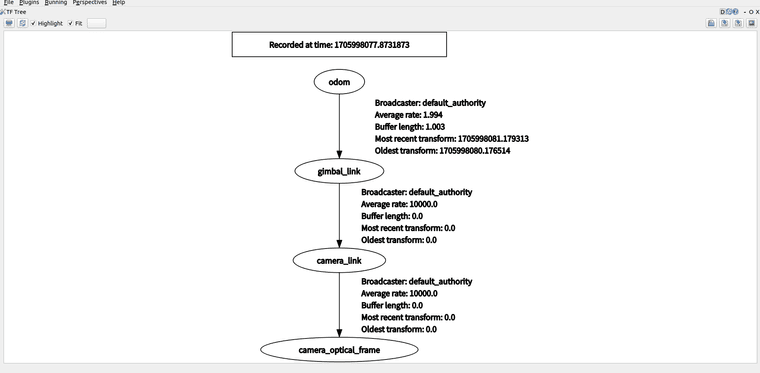
求助各位大佬该如何解决