导航问题、建图偏移,小车参考系乱动
-
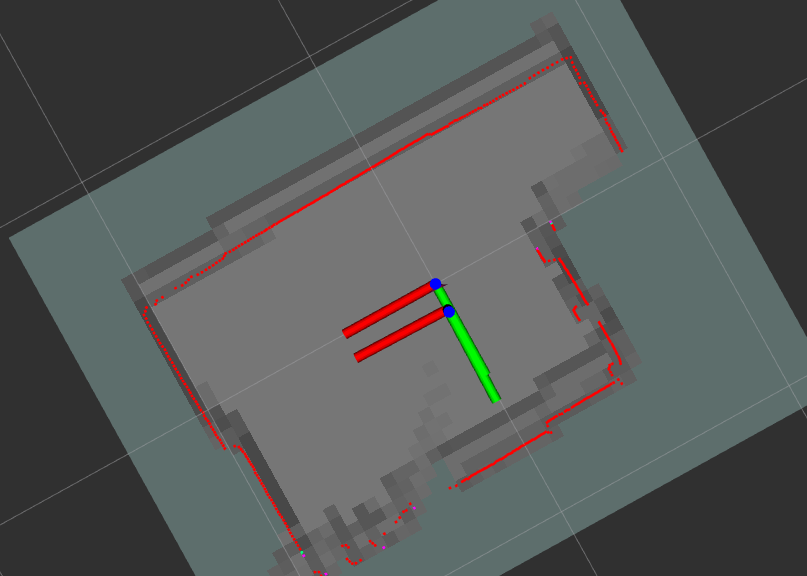 ,建图时,小车并没有动,但红线会偏移,且图中的小车坐标系,旋转移动,怎么解决,麻烦了
,建图时,小车并没有动,但红线会偏移,且图中的小车坐标系,旋转移动,怎么解决,麻烦了 -
在机器人导航和建图过程中,遇到小车未动但红线偏移以及小车坐标系旋转移动的问题,通常涉及到传感器数据、里程计信息、定位算法或软件配置等多个方面。以下是一些可能的解决方案和排查步骤:
-
检查传感器数据:
- 确保激光雷达或其他传感器正常工作,没有被遮挡或污染。
- 检查传感器数据的稳定性和连续性,是否存在噪声或异常值。
-
校准里程计:
- 如果小车使用了编码器或IMU等设备进行里程计估计,确保这些设备已经正确校准。
- 检查里程计数据的准确性,与实际情况对比是否有较大偏差。
-
优化定位算法:
- 如果使用了SLAM(同时定位与地图构建)算法,尝试调整算法参数,优化地图构建和定位效果。
- 考虑使用其他定位方法,如GPS、RFID标签或视觉定位等,作为辅助或验证手段。
-
检查软件配置:
- 确保导航和建图软件的配置正确,包括传感器接口、数据解析和坐标系设置等。
- 检查是否有软件bug或版本不兼容的问题,尝试更新软件或查找相关补丁。
-
同步和时间戳:
- 确保传感器数据和里程计数据的时间戳同步,避免因时间不同步导致的建图偏移问题。
-
环境因素:
- 考虑环境因素对建图的影响,如地面反射、动态障碍物等,这些可能导致传感器数据异常。
-
数据预处理:
- 在建图前对数据进行预处理,如滤波、去噪等,以提高数据质量。
-
硬件检查:
- 检查小车的机械结构是否稳定,是否存在松动或变形等情况。
- 检查电源和供电线路,确保稳定供电,避免因电压波动导致的传感器或计算单元不稳定。
-
查看日志和错误信息:
- 仔细查看系统日志和错误信息,可能包含导致问题的线索。
-
社区和论坛支持:
- 如果上述步骤都无法解决问题,可以尝试在相关的机器人社区或论坛发帖求助,可能有其他开发者遇到过类似问题并分享了解决方案。
解决这类问题通常需要耐心和细致的调查,可能需要多次尝试和调整才能找到根本原因并解决问题。
以上为生成回答,仅供参考~
-
-
@小伊 参考系晃动,主要是因为什么硬件造成的,和超声波雷达有关系吗,未安装IMU
-
当参考系出现晃动时,这可能是由于多种硬件因素导致的。在没有IMU(惯性测量单元)的情况下,手机或其他设备可能无法精确地检测和补偿这种晃动。IMU通常包括加速度计和陀螺仪,它们可以测量设备的加速度和角速度,从而帮助减少晃动对设备定位或功能的影响。
晃动可能与设备的内部组件、传感器、结构设计、以及外部环境等多种因素有关。例如,如果设备的结构不够稳固,或者某些内部组件没有固定好,那么在移动或外部力量作用下,就可能出现晃动。此外,如果设备中有松动的部件或者存在制造缺陷,也可能导致晃动现象。
至于超声波雷达,它主要用于测距和定位,与参考系的晃动没有直接关系。超声波雷达主要用于环境感知,比如自动驾驶汽车或智能机器人中的障碍物检测,它并不涉及设备的稳定性或晃动问题。
因此,如果参考系晃动,建议首先检查设备的结构设计、内部组件的固定情况,以及是否存在制造缺陷或硬件故障。如果问题仍然存在,可能需要考虑增加IMU或其他稳定性控制硬件来提高设备的稳定性。
以上为生成回答,仅供参考~
-
@小伊 和激光雷达的晃动有关系吗
-
“@小伊”看起来像是一个用户名或者是一个特定的标识,而激光雷达的晃动通常与多种因素相关,包括设备本身的稳定性、环境因素、目标的运动等。根据我所了解的知识,用户名或标识如“@小伊”与激光雷达的晃动没有直接的关系。
激光雷达的晃动可能由设备本身的问题引起,例如发射和接收频率的不稳定、温度敏感性以及机械结构的问题。此外,目标的运动抖动和周围环境的变化也可能影响雷达的测量精度,导致晃动。同时,雷达天线的姿态变化,如振动或偏移,也会对雷达跟踪目标的精度产生影响。
如果“@小伊”指的是某个具体的系统、软件或者控制激光雷达的实体,那么它可能间接地影响激光雷达的晃动,比如通过控制参数的设置、数据处理的方式等。但具体情况需要更详细的信息来确定。
综上所述,从一般的角度来看,“@小伊”与激光雷达的晃动没有直接的关系。如果需要更准确的答案,请提供更多的上下文或详细信息。
以上为生成回答,仅供参考~
-
@414115309 解决了吗
-
车子不动但rviz里的坐标在动?大概率轮子打滑了
-
@小鱼 鱼哥我也是同样问题 总是重定位导致小车总是前后左右漂移