根据小鱼的教程来的,但是自己编写的时候使用RCLCPP_INFO打印name.c_str()报错
-
想写一个节点接受imu数据,功能没问题能接收到,但是这一句
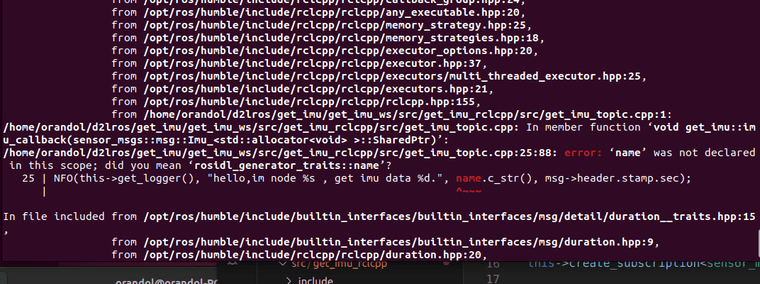
RCLCPP_INFO(this->get_logger(), "hello,im node %s , get imu data %d.", name.c_str(), msg->header.stamp.sec);
只要加上name.c_str(),colcon build就会报错,删掉就没事,虽然不影响功能,但是我之前学小鱼ROS的教程,在例子里面都是正常不错的,报错信息如下:error: ‘name’ was not declared in this scope; did you mean ‘rosidl_generator_traits::name’?
-
从您提供的错误信息和代码片段来看,问题出在
name变量没有在当前作用域内声明。RCLCPP_INFO宏是用于在ROS 2节点中记录日志信息的,并且它期望你提供一个有效的字符串来替换格式化字符串中的%s。假设您正在尝试打印节点的名称,并且您遵循了ROS 2节点创建的标准模式,您通常会使用类的成员变量(例如
node_name_)来存储节点的名称。但是,在您的代码中,您使用了name这个变量,而它可能并没有在您尝试打印它的地方被定义。以下是一个标准的ROS 2节点的示例,展示了如何声明和使用节点名称:
#include <rclcpp/rclcpp.hpp> class MyImuNode : public rclcpp::Node { public: MyImuNode(const std::string &node_name) : Node(node_name) { // ... 初始化代码 ... // 假设这里有一个回调函数来处理IMU数据 // 在回调函数中,您可以使用成员变量 node_name_ 来记录日志 void imu_callback(const sensor_msgs::msg::Imu::SharedPtr msg) { RCLCPP_INFO(this->get_logger(), "hello, imu node %s, get imu data %d.", this->get_name().c_str(), msg->header.stamp.sec); // 注意:这里使用了 this->get_name().c_str() 来获取节点名称 } // ... 其他代码 ... }; private: // ... 类的私有成员变量和方法 ... }; int main(int argc, char **argv) { rclcpp::init(argc, argv); auto node = std::make_shared<MyImuNode>("my_imu_node"); // ... 运行节点 ... rclcpp::spin(node); rclcpp::shutdown(); return 0; }在上面的示例中,
MyImuNode类继承自rclcpp::Node,并且在构造函数中通过Node(node_name)初始化了节点名称。在imu_callback方法中,我使用了this->get_name().c_str()来获取节点名称的C字符串表示,并将其传递给RCLCPP_INFO宏。请注意,在您的代码中,您应该使用类似的成员变量或方法来获取节点名称,而不是直接使用未声明的
name变量。如果name应该是节点的名称,那么您应该使用this->get_name().c_str()来代替name.c_str()。
以上为生成回答,仅供参考~
-
@小伊 还是一样的报错,这是我的全部代码。
#include "rclcpp/rclcpp.hpp"
#include <string>
#include <iostream>
#include "sensor_msgs/msg/imu.hpp"
#include "std_msgs/msg/int32.hpp"
#include <iostream>
#include <chrono>
#include <unistd.h>class get_imu : public rclcpp::Node
{
public:
get_imu(std::string name):Node(name)
{
RCLCPP_INFO(this->get_logger(), "hello,im node %s, trying to get imu data.", this->get_name().c_str());
imu_subscribe_ = this->create_subscription<sensor_msgs::msg::Imu>("imu", rclcpp::SensorDataQoS(), std::bind(&get_imu::imu_callback, this, std::placeholders::_1));
}private:
rclcpp::Subscription<sensor_msgs::msg::Imu>::SharedPtr imu_subscribe_;
void imu_callback(const sensor_msgs::msg::Imu::SharedPtr msg)
{
//std_msgs::msg::Int32 sec = 0;
//sec = msg->header.stamp.sec;
RCLCPP_INFO(this->get_logger(), "hello,im node %s , get imu data %d.", this->get_name().c_str(), msg->header.stamp.nanosec);
}
};int main(int argc, char argv)
{
rclcpp::init(argc, argv);
/创建对应节点的共享指针对象/
auto node = std::make_shared<get_imu>("get_imu");
/ 运行节点,并检测退出信号/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
} -
您提供的代码中存在几个语法错误和潜在的问题,我将一一指出并提供修正后的代码。
- HTML实体问题:在您的代码中,您使用了
<和>来表示<和>。在C++中,您应该直接使用<和>。 - 包含头文件:您包含了两次
<iostream>,这是不必要的。 - main函数参数:
main函数的参数应为char *argv[]而不是char argv。 std::placeholders::_1的使用:在C++11及以后的版本中,为了与std::bind一起使用,您需要包含<functional>头文件。- 变量命名:尽管这不是一个错误,但最好使用
std::shared_ptr而不是::SharedPtr作为类型别名,以保持代码清晰。
以下是修正后的代码:
#include "rclcpp/rclcpp.hpp" #include <string> #include <iostream> #include <chrono> #include <unistd.h> #include "sensor_msgs/msg/imu.hpp" #include <functional> // For std::placeholders class get_imu : public rclcpp::Node { public: get_imu(std::string name) : Node(name) { RCLCPP_INFO(this->get_logger(), "hello, I'm node %s, trying to get imu data.", this->get_name().c_str()); imu_subscribe_ = this->create_subscription<sensor_msgs::msg::Imu>( "imu", rclcpp::SensorDataQoS(), std::bind(&get_imu::imu_callback, this, std::placeholders::_1)); } private: rclcpp::Subscription<sensor_msgs::msg::Imu>::SharedPtr imu_subscribe_; void imu_callback(const sensor_msgs::msg::Imu::SharedPtr msg) { RCLCPP_INFO(this->get_logger(), "hello, I'm node %s, got imu data with timestamp %ld ns.", this->get_name().c_str(), msg->header.stamp.nanosec); } }; int main(int argc, char *argv[]) // Note the change in argv's type { rclcpp::init(argc, argv); auto node = std::make_shared<get_imu>("get_imu"); rclcpp::spin(node); rclcpp::shutdown(); return 0; }注意:我还修改了日志消息中的时间戳输出,以更清晰地表示它是纳秒(ns)。
以上为生成回答,仅供参考~
- HTML实体问题:在您的代码中,您使用了
-
看错误是因为name 没有声明最好提供下完整代码看看,才能找出错误。
下次注意:
https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答 -
小鱼,上面这个就是我的全部代码,订阅fishbot的imu节点的。
@845865588 在 根据小鱼的教程来的,但是自己编写的时候使用RCLCPP_INFO打印name.c_str()报错 中说:
@小伊 还是一样的报错,这是我的全部代码。
#include "rclcpp/rclcpp.hpp"
#include <string>
#include <iostream>
#include "sensor_msgs/msg/imu.hpp"
#include "std_msgs/msg/int32.hpp"
#include <iostream>
#include <chrono>
#include <unistd.h>class get_imu : public rclcpp::Node
{
public:
get_imu(std::string name):Node(name)
{
RCLCPP_INFO(this->get_logger(), "hello,im node %s, trying to get imu data.", this->get_name().c_str());
imu_subscribe_ = this->create_subscription<sensor_msgs::msg::Imu>("imu", rclcpp::SensorDataQoS(), std::bind(&get_imu::imu_callback, this, std::placeholders::_1));
}private:
rclcpp::Subscription<sensor_msgs::msg::Imu>::SharedPtr imu_subscribe_;
void imu_callback(const sensor_msgs::msg::Imu::SharedPtr msg)
{
//std_msgs::msg::Int32 sec = 0;
//sec = msg->header.stamp.sec;
RCLCPP_INFO(this->get_logger(), "hello,im node %s , get imu data %d.", this->get_name().c_str(), msg->header.stamp.nanosec);
}
};int main(int argc, char argv)
{
rclcpp::init(argc, argv);
/创建对应节点的共享指针对象/
auto node = std::make_shared<get_imu>("get_imu");
/ 运行节点,并检测退出信号/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
} -
您的代码中存在一些语法错误和潜在的问题,这可能导致编译失败。下面我将指出这些问题并提供修改后的代码:
-
<和>应该被用来包围包含的头文件,但您的代码中使用了<和>,这是HTML实体编码,而不是C++中的正确符号。 -
在
main函数中,您使用了std::make_shared<get_imu>,这同样应该使用<和>。 -
在
imu_callback函数中,您试图打印msg->header.stamp.nanosec,这是一个int64_t类型的值,但您使用了%d格式化字符串,这通常用于int。对于int64_t,您应该使用%ld(或对于int64_t在某些编译器中更准确的格式是%PRId64,但这需要包含<inttypes.h>)。 -
您的代码中有两个
#include <iostream>,这是不必要的,可以删除一个。 -
#include <unistd.h>在这个上下文中看起来是不必要的,除非您计划在未来的代码中使用它(比如usleep)。如果不需要,可以删除它。
下面是修改后的代码:
#include "rclcpp/rclcpp.hpp" #include <string> #include <iostream> #include "sensor_msgs/msg/imu.hpp" // 删除了 std_msgs/msg/int32.hpp,因为您的代码中没有使用它 #include <chrono> // 删除了 #include <unistd.h>,除非您确定需要它 class get_imu : public rclcpp::Node { public: get_imu(std::string name) : Node(name) { RCLCPP_INFO(this->get_logger(), "hello,im node %s, trying to get imu data.", this->get_name().c_str()); imu_subscribe_ = this->create_subscription<sensor_msgs::msg::Imu>( "imu", rclcpp::SensorDataQoS(), std::bind(&get_imu::imu_callback, this, std::placeholders::_1)); } private: rclcpp::Subscription<sensor_msgs::msg::Imu>::SharedPtr imu_subscribe_; void imu_callback(const sensor_msgs::msg::Imu::SharedPtr msg) { // 使用 %ld 或 %PRId64 来格式化 int64_t RCLCPP_INFO(this->get_logger(), "hello,im node %s, get imu data %ld.", this->get_name().c_str(), msg->header.stamp.nanosec); } }; int main(int argc, char *argv[]) { rclcpp::init(argc, argv); // 使用 < 和 > 而不是 < 和 > auto node = std::make_shared<get_imu>("get_imu"); rclcpp::spin(node); rclcpp::shutdown(); return 0; }请尝试编译并运行修改后的代码。如果您遇到任何其他问题,请确保您已正确设置了ROS 2工作空间和编译工具链。
以上为生成回答,仅供参考~
-