nav2 运行出错
-
hunble22.04 ros2 跟着小鱼教程 学ros2
使用nav2时里程计用laser_scan_matcher.提供code_text RCLCPP_INFO(get_logger(), "Creating laser_scan_matcher"); add_parameter("publish_odom", rclcpp::ParameterValue(std::string("odom")), "If publish odometry from laser_scan. Empty if not, otherwise name of the topic"); add_parameter("publish_tf", rclcpp::ParameterValue(false), " If publish tf odom->base_link"); `ros2 launch fishbot_navigation2 navigation2.launch.py中终端内
code_text[rviz2-2] 2024-07-28 11:25:46.809 [RTPS_TRANSPORT_SHM Error] Failed init_port fastrtps_port7477: open_and_lock_file failed -> Function open_port_internal
[component_container_isolated-1] [INFO] [1722137146.837369409] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_map_server/lib/libmap_server_core.so
[component_container_isolated-1] [INFO] [1722137146.853523429] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapSaver>
[component_container_isolated-1] [INFO] [1722137146.853556537] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapServer>
[component_container_isolated-1] [INFO] [1722137146.853567262] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapServer>
[component_container_isolated-1] [INFO] [1722137146.867412297] [map_server]:
[component_container_isolated-1] map_server lifecycle node launched.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/map_server' in container 'nav2_container'
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1722137146.867457710] [map_server]: Creating
[component_container_isolated-1] [INFO] [1722137146.871054209] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_amcl/lib/libamcl_core.so
[component_container_isolated-1] [INFO] [1722137146.875528503] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_amcl::AmclNode>
[component_container_isolated-1] [INFO] [1722137146.875568178] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_amcl::AmclNode>
[component_container_isolated-1] [INFO] [1722137146.888134712] [amcl]:
[component_container_isolated-1] amcl lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1722137146.889189266] [amcl]: Creating
[component_container_isolated-1] [INFO] [1722137146.894089175] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_controller/lib/libcontroller_server_core.so
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/amcl' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137146.897646839] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_controller::ControllerServer>
[component_container_isolated-1] [INFO] [1722137146.897674399] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_controller::ControllerServer>
[component_container_isolated-1] [INFO] [1722137146.909650903] [controller_server]:
[component_container_isolated-1] controller_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[map_server-3] [INFO] [1722137146.913095317] [map_server]: Configuring
[map_server-3] [INFO] [map_io]: Loading yaml file: /home/dt/Multi_Robot_2/install/fishbot_navigation2/share/fishbot_navigation2/maps/imu_map.yaml
[map_server-3] [DEBUG] [map_io]: resolution: 0.05
[map_server-3] [DEBUG] [map_io]: origin[0]: -13.5
[map_server-3] [DEBUG] [map_io]: origin[1]: -10.1
[map_server-3] [DEBUG] [map_io]: origin[2]: 0
[map_server-3] [DEBUG] [map_io]: free_thresh: 0.25
[map_server-3] [DEBUG] [map_io]: occupied_thresh: 0.65
[map_server-3] [DEBUG] [map_io]: mode: trinary
[map_server-3] [DEBUG] [map_io]: negate: 0
[map_server-3] [INFO] [map_io]: Loading image_file: /home/dt/Multi_Robot_2/install/fishbot_navigation2/share/fishbot_navigation2/maps/imu_map.pgm
[component_container_isolated-1] [INFO] [1722137146.922513511] [controller_server]: Creating controller server
[component_container_isolated-1] [INFO] [1722137146.940034576] [local_costmap.local_costmap]:
[component_container_isolated-1] local_costmap lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1722137146.941162813] [local_costmap.local_costmap]: Creating Costmap
[component_container_isolated-1] [INFO] [1722137146.944425330] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_lifecycle_manager/lib/libnav2_lifecycle_manager_core.so
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/controller_server' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137146.945412924] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1722137146.945441145] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[map_server-3] [DEBUG] [map_io]: Read map /home/dt/Multi_Robot_2/install/fishbot_navigation2/share/fishbot_navigation2/maps/imu_map.pgm: 364 X 412 map @ 0.05 m/cell
[lifecycle_manager-4] [INFO] [1722137146.954994104] [lifecycle_manager_mapper]: Activating map_server
[component_container_isolated-1] [WARN] [1722137146.955280402] [rcl_lifecycle]: No transition matching 3 found for current state unconfigured
[component_container_isolated-1] [ERROR] [1722137146.955301057] [map_server]: Unable to start transition 3 from current state unconfigured: Transition is not registered., at ./src/rcl_lifecycle.c:355
[map_server-3] [INFO] [1722137146.955390969] [map_server]: Activating
[map_server-3] [INFO] [1722137146.955624837] [map_server]: Creating bond (map_server) to lifecycle manager.
[lifecycle_manager-4] [ERROR] [1722137146.955645845] [lifecycle_manager_mapper]: Failed to change state for node: map_server
[lifecycle_manager-4] [ERROR] [1722137146.955681098] [lifecycle_manager_mapper]: Failed to bring up all requested nodes. Aborting bringup.
[component_container_isolated-1] [INFO] [1722137146.959347762] [lifecycle_manager_localization]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/lifecycle_manager_localization' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137146.962987386] [lifecycle_manager_localization]: Creating and initializing lifecycle service clients
[component_container_isolated-1] [INFO] [1722137146.963125965] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_smoother/lib/libsmoother_server_core.so
[component_container_isolated-1] [INFO] [1722137146.965185948] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_smoother::SmootherServer>
[component_container_isolated-1] [INFO] [1722137146.965213000] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_smoother::SmootherServer>
[component_container_isolated-1] [INFO] [1722137146.971900266] [lifecycle_manager_localization]: Starting managed nodes bringup...
[component_container_isolated-1] [INFO] [1722137146.971955607] [lifecycle_manager_localization]: Configuring map_server
[component_container_isolated-1] [INFO] [1722137146.972105888] [map_server]: Configuring
[component_container_isolated-1] [ERROR] [1722137146.972580021] [lifecycle_manager_localization]: Failed to change state for node: map_server
[component_container_isolated-1] [ERROR] [1722137146.972632723] [lifecycle_manager_localization]: Failed to bring up all requested nodes. Aborting bringup.
[component_container_isolated-1] [INFO] [map_io]: Loading yaml file: /home/dt/Multi_Robot_2/install/fishbot_navigation2/share/fishbot_navigation2/maps/imu_map.yaml
[component_container_isolated-1] [DEBUG] [map_io]: resolution: 0.05
[component_container_isolated-1] [DEBUG] [map_io]: origin[0]: -13.5
[component_container_isolated-1] [DEBUG] [map_io]: origin[1]: -10.1
[component_container_isolated-1] [DEBUG] [map_io]: origin[2]: 0
[component_container_isolated-1] [DEBUG] [map_io]: free_thresh: 0.25
[component_container_isolated-1] [DEBUG] [map_io]: occupied_thresh: 0.65
[component_container_isolated-1] [DEBUG] [map_io]: mode: trinary
[component_container_isolated-1] [DEBUG] [map_io]: negate: 0
[component_container_isolated-1] [INFO] [map_io]: Loading image_file: /home/dt/Multi_Robot_2/install/fishbot_navigation2/share/fishbot_navigation2/maps/imu_map.pgm
[map_server-3] [WARN] [1722137146.972265671] [rcl_lifecycle]: No transition matching 1 found for current state active
[map_server-3] [ERROR] [1722137146.972283652] [map_server]: Unable to start transition 1 from current state active: Transition is not registered., at ./src/rcl_lifecycle.c:355
[component_container_isolated-1] [INFO] [1722137146.983974100] [smoother_server]:
[component_container_isolated-1] smoother_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1722137146.987295991] [smoother_server]: Creating smoother server
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/smoother_server' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137146.989303100] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_planner/lib/libplanner_server_core.so
[component_container_isolated-1] [INFO] [1722137146.990236439] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_planner::PlannerServer>
[component_container_isolated-1] [INFO] [1722137146.990255175] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_planner::PlannerServer>
[component_container_isolated-1] [INFO] [1722137147.001118958] [planner_server]:
[component_container_isolated-1] planner_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [DEBUG] [map_io]: Read map /home/dt/Multi_Robot_2/install/fishbot_navigation2/share/fishbot_navigation2/maps/imu_map.pgm: 364 X 412 map @ 0.05 m/cell
[component_container_isolated-1] [INFO] [1722137147.005190997] [planner_server]: Creating
[component_container_isolated-1] [INFO] [1722137147.131675106] [global_costmap.global_costmap]:
[component_container_isolated-1] global_costmap lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1722137147.133412419] [global_costmap.global_costmap]: Creating Costmap
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/planner_server' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137147.140852577] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_behaviors/lib/libbehavior_server_core.so
[component_container_isolated-1] [INFO] [1722137147.146656498] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<behavior_server::BehaviorServer>
[component_container_isolated-1] [INFO] [1722137147.146692320] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<behavior_server::BehaviorServer>
[component_container_isolated-1] [INFO] [1722137147.170025662] [behavior_server]:
[component_container_isolated-1] behavior_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/behavior_server' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137147.180584542] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_bt_navigator/lib/libbt_navigator_core.so
[component_container_isolated-1] [INFO] [1722137147.183794581] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_bt_navigator::BtNavigator>
[component_container_isolated-1] [INFO] [1722137147.183825298] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_bt_navigator::BtNavigator>
[component_container_isolated-1] [INFO] [1722137147.201577850] [bt_navigator]:
[component_container_isolated-1] bt_navigator lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1722137147.201642197] [bt_navigator]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/bt_navigator' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137147.204176331] [nav2_container]: Load Library: /home/dt/Multi_Robot_2/install/nav2_waypoint_follower/lib/libwaypoint_follower_core.so
[component_container_isolated-1] [INFO] [1722137147.205113657] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_waypoint_follower::WaypointFollower>
[component_container_isolated-1] [INFO] [1722137147.205136145] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_waypoint_follower::WaypointFollower>
[rviz2-2] [INFO] [1722137147.206425065] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-2] [INFO] [1722137147.206565412] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[rviz2-2] [INFO] [1722137147.235694218] [rviz2]: Stereo is NOT SUPPORTED
[component_container_isolated-1] [INFO] [1722137147.361904395] [waypoint_follower]:
[component_container_isolated-1] waypoint_follower lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1722137147.362849019] [waypoint_follower]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/waypoint_follower' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137147.364855484] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1722137147.364880457] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1722137147.374970339] [lifecycle_manager_navigation]: Creating
[component_container_isolated-1] [INFO] [1722137147.377907395] [lifecycle_manager_navigation]: Creating and initializing lifecycle service clients
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/lifecycle_manager_navigation' in container 'nav2_container'
[component_container_isolated-1] [INFO] [1722137147.391297881] [lifecycle_manager_navigation]: Starting managed nodes bringup...
[component_container_isolated-1] [INFO] [1722137147.391385725] [lifecycle_manager_navigation]: Configuring controller_server
[component_container_isolated-1] [INFO] [1722137147.391573737] [controller_server]: Configuring controller interface
[component_container_isolated-1] [INFO] [1722137147.391808633] [controller_server]: getting goal checker plugins..
[component_container_isolated-1] [INFO] [1722137147.392095979] [controller_server]: Controller frequency set to 10.0000Hz
[component_container_isolated-1] [INFO] [1722137147.392121571] [local_costmap.local_costmap]: Configuring
[component_container_isolated-1] [INFO] [1722137147.400819277] [local_costmap.local_costmap]: Using plugin "obstacle_layer"
[component_container_isolated-1] [INFO] [1722137147.404866388] [local_costmap.local_costmap]: Subscribed to Topics: scan
[component_container_isolated-1] [INFO] [1722137147.410418125] [local_costmap.local_costmap]: Initialized plugin "obstacle_layer"
[component_container_isolated-1] [INFO] [1722137147.410447215] [local_costmap.local_costmap]: Using plugin "voxel_layer"
[component_container_isolated-1] [INFO] [1722137147.411394349] [local_costmap.local_costmap]: Subscribed to Topics: pointcloud
[component_container_isolated-1] [INFO] [1722137147.419593814] [local_costmap.local_costmap]: Initialized plugin "voxel_layer"
[component_container_isolated-1] [INFO] [1722137147.419624000] [local_costmap.local_costmap]: Using plugin "inflation_layer"
[component_container_isolated-1] [INFO] [1722137147.420598896] [local_costmap.local_costmap]: Initialized plugin "inflation_layer"
[component_container_isolated-1] [INFO] [1722137147.429497491] [controller_server]: Created progress_checker : progress_checker of type nav2_controller::SimpleProgressChecker
[component_container_isolated-1] [INFO] [1722137147.430265011] [controller_server]: Created goal checker : goal_checker of type nav2_controller::SimpleGoalChecker
[component_container_isolated-1] [INFO] [1722137147.430743020] [controller_server]: Controller Server has goal_checker goal checkers available.
[rviz2-2] [WARN] [1722137147.431036444] [rcl.logging_rosout]: Publisher already registered for provided node name. If this is due to multiple nodes with the same name then all logs for that logger name will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
[component_container_isolated-1] [INFO] [1722137147.433943869] [controller_server]: Created controller : FollowPath of type dwb_core::DWBLocalPlanner
[component_container_isolated-1] [INFO] [1722137147.435494951] [controller_server]: Setting transform_tolerance to 0.200000
[component_container_isolated-1] [INFO] [1722137147.448130601] [controller_server]: Using critic "RotateToGoal" (dwb_critics::RotateToGoalCritic)
[component_container_isolated-1] [INFO] [1722137147.448880167] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1722137147.449079516] [controller_server]: Using critic "Oscillation" (dwb_critics::OscillationCritic)
[component_container_isolated-1] [INFO] [1722137147.449762141] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1722137147.449950367] [controller_server]: Using critic "BaseObstacle" (dwb_critics::BaseObstacleCritic)
[component_container_isolated-1] [INFO] [1722137147.450223546] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1722137147.450385423] [controller_server]: Using critic "GoalAlign" (dwb_critics::GoalAlignCritic)
[component_container_isolated-1] [INFO] [1722137147.450852092] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1722137147.451009755] [controller_server]: Using critic "PathAlign" (dwb_critics::PathAlignCritic)
[component_container_isolated-1] [INFO] [1722137147.451458697] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1722137147.451651320] [controller_server]: Using critic "PathDist" (dwb_critics::PathDistCritic)
[component_container_isolated-1] [INFO] [1722137147.451977775] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1722137147.452156848] [controller_server]: Using critic "GoalDist" (dwb_critics::GoalDistCritic)
[component_container_isolated-1] [INFO] [1722137147.452486615] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1722137147.452516556] [controller_server]: Controller Server has FollowPath controllers available.
[component_container_isolated-1] [INFO] [1722137147.460223844] [lifecycle_manager_navigation]: Configuring smoother_server
[component_container_isolated-1] [INFO] [1722137147.460328251] [smoother_server]: Configuring smoother server
[rviz2-2] [INFO] [1722137147.485556059] [rviz2]: Trying to create a map of size 364 x 412 using 1 swatches
[rviz2-2] [ERROR] [1722137147.488170689] [rviz2]: Vertex Program:rviz/glsl120/indexed_8bit_image.vert Fragment Program:rviz/glsl120/indexed_8bit_image.frag GLSL link result :
[rviz2-2] active samplers with a different type refer to the same texture image unit
[component_container_isolated-1] [INFO] [1722137147.781854185] [smoother_server]: Created smoother : simple_smoother of type nav2_smoother::SimpleSmoother
[component_container_isolated-1] [INFO] [1722137147.784782306] [smoother_server]: Smoother Server has simple_smoother smoothers available.
[component_container_isolated-1] [INFO] [1722137147.830436436] [lifecycle_manager_navigation]: Configuring planner_server
[component_container_isolated-1] [INFO] [1722137147.830552565] [planner_server]: Configuring
[component_container_isolated-1] [INFO] [1722137147.830576333] [global_costmap.global_costmap]: Configuring
[component_container_isolated-1] [INFO] [1722137147.836312196] [global_costmap.global_costmap]: Using plugin "static_layer"
[component_container_isolated-1] [INFO] [1722137147.837396251] [global_costmap.global_costmap]: Subscribing to the map topic (/map) with transient local durability
[component_container_isolated-1] [INFO] [1722137147.838073145] [global_costmap.global_costmap]: Initialized plugin "static_layer"
[component_container_isolated-1] [INFO] [1722137147.838091726] [global_costmap.global_costmap]: Using plugin "obstacle_layer"
[component_container_isolated-1] [INFO] [1722137147.838943382] [global_costmap.global_costmap]: Subscribed to Topics: scan
[rviz2-2] [INFO] [1722137148.125916351] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722137147.000 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1722137148.222068790] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722137147.000 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1722137148.285429563] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722137147.000 for reason 'discarding message because the queue is full'
[component_container_isolated-1] [INFO] [1722137148.304781389] [global_costmap.global_costmap]: Initialized plugin "obstacle_layer"
[component_container_isolated-1] [INFO] [1722137148.304812870] [global_costmap.global_costmap]: Using plugin "voxel_layer"
[component_container_isolated-1] [INFO] [1722137148.305080674] [global_costmap.global_costmap]: StaticLayer: Resizing costmap to 364 X 412 at 0.050000 m/pix
[component_container_isolated-1] [INFO] [1722137148.305433287] [voxel_grid]: Error, this implementation can only support up to 16 z values (1678435672)
[component_container_isolated-1] [INFO] [1722137148.307412715] [global_costmap.global_costmap]: Subscribed to Topics: pointcloud
[rviz2-2] [INFO] [1722137148.350362692] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722137147.000 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1722137148.413544530] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722137147.000 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1722137148.477743102] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722137147.000 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1722137148.542049358] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722137147.000 for reason 'discarding message because the queue is full'^Z
[9]+ 已停止 ros2 launch fishbot_navigation2 navigation2.launch.py
后面就是还有一条
component_container_isolated-1] [INFO] [1722138117.796544781] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist这个在好多终端内都存在
code_textdt@dt:~/Multi_Robot_2$ ros2 run ros2_laser_scan_matcher laser_scan_matcher 2024-07-28 10:55:46.092 [RTPS_TRANSPORT_SHM Error] Failed init_port fastrtps_port7419: open_and_lock_file failed -> Function open_port_internal启动 laser_scan_matcher终端内
code_textdt@dt:~/Multi_Robot_2$ ros2 run ros2_laser_scan_matcher laser_scan_matcher 2024-07-28 10:55:46.092 [RTPS_TRANSPORT_SHM Error] Failed init_port fastrtps_port7419: open_and_lock_file failed -> Function open_port_internal [INFO] [1722135346.107366922] [laser_scan_matcher]: Creating laser_scan_matcher启动rqt终端内
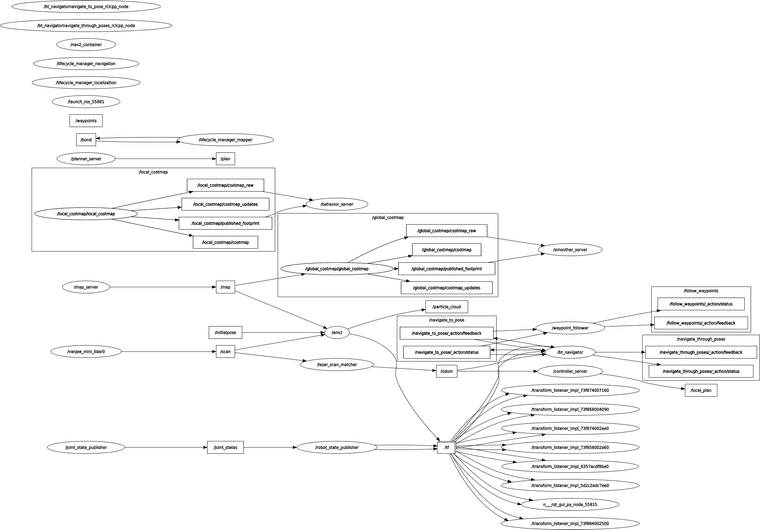
rqt 2024-07-28 11:30:52.177 [RTPS_TRANSPORT_SHM Error] Failed init_port fastrtps_port7419: open_and_lock_file failed -> Function open_port_internal [ERROR] [1722137478.666531023] [get_message_class]: Malformed msg message_type: nav2_msgs/action/FollowWaypoints_FeedbackMessage TopicInfo.__init__(): topic "/follow_waypoints/_action/feedback": can not get message class for type "nav2_msgs/action/FollowWaypoints_FeedbackMessage" [ERROR] [1722137478.670896834] [get_message_class]: Malformed msg message_type: nav2_msgs/action/NavigateThroughPoses_FeedbackMessage TopicInfo.__init__(): topic "/navigate_through_poses/_action/feedback": can not get message class for type "nav2_msgs/action/NavigateThroughPoses_FeedbackMessage" [ERROR] [1722137478.671377864] [get_message_class]: Malformed msg message_type: nav2_msgs/action/NavigateToPose_FeedbackMessage TopicInfo.__init__(): topic "/navigate_to_pose/_action/feedback": can not get message class for type "nav2_msgs/action/NavigateToPose_FeedbackMessage" [ERROR] [1722137486.656854325] [get_message_class]: Malformed msg message_type: nav2_msgs/action/FollowPath_FeedbackMessage TopicInfo.__init__(): topic "/follow_path/_action/feedback": can not get message class for type "nav2_msgs/action/FollowPath_FeedbackMessage" [ERROR] [1722137489.635361523] [get_message_class]: Malformed msg message_type: nav2_msgs/action/SmoothPath_FeedbackMessage TopicInfo.__init__(): topic "/smooth_path/_action/feedback": can not get message class for type "nav2_msgs/action/SmoothPath_FeedbackMessage" [ERROR] [1722137495.635318487] [get_message_class]: Malformed msg message_type: nav2_msgs/action/ComputePathToPose_FeedbackMessage TopicInfo.__init__(): topic "/compute_path_to_pose/_action/feedback": can not get message class for type "nav2_msgs/action/ComputePathToPose_FeedbackMessage" [ERROR] [1722137498.633560281] [get_message_class]: Malformed msg message_type: nav2_msgs/action/BackUp_FeedbackMessage TopicInfo.__init__(): topic "/backup/_action/feedback": can not get message class for type "nav2_msgs/action/BackUp_FeedbackMessage" [ERROR] [1722137498.635345451] [get_message_class]: Malformed msg message_type: nav2_msgs/action/ComputePathThroughPoses_FeedbackMessage TopicInfo.__init__(): topic "/compute_path_through_poses/_action/feedback": can not get message class for type "nav2_msgs/action/ComputePathThroughPoses_FeedbackMessage" [ERROR] [1722137498.636810757] [get_message_class]: Malformed msg message_type: nav2_msgs/action/Spin_FeedbackMessage TopicInfo.__init__(): topic "/spin/_action/feedback": can not get message class for type "nav2_msgs/action/Spin_FeedbackMessage" [ERROR] [1722137501.633014734] [get_message_class]: Malformed msg message_type: nav2_msgs/action/DriveOnHeading_FeedbackMessage TopicInfo.__init__(): topic "/drive_on_heading/_action/feedback": can not get message class for type "nav2_msgs/action/DriveOnHeading_FeedbackMessage" [ERROR] [1722137501.633953577] [get_message_class]: Malformed msg message_type: nav2_msgs/action/Wait_FeedbackMessage TopicInfo.__init__(): topic "/wait/_action/feedback": can not get message class for type "nav2_msgs/action/Wait_FeedbackMessage"topic图:
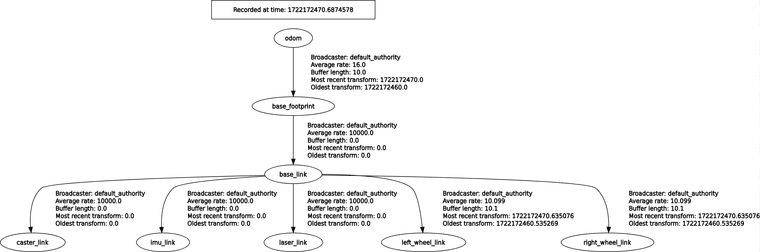
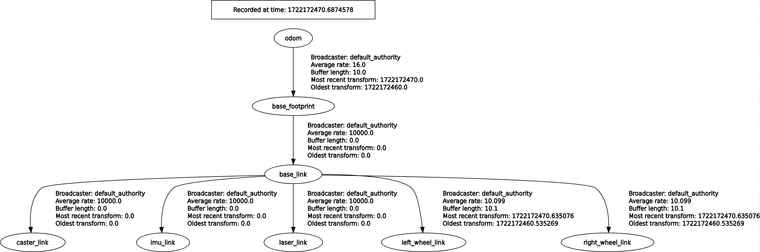
TF:
rviz: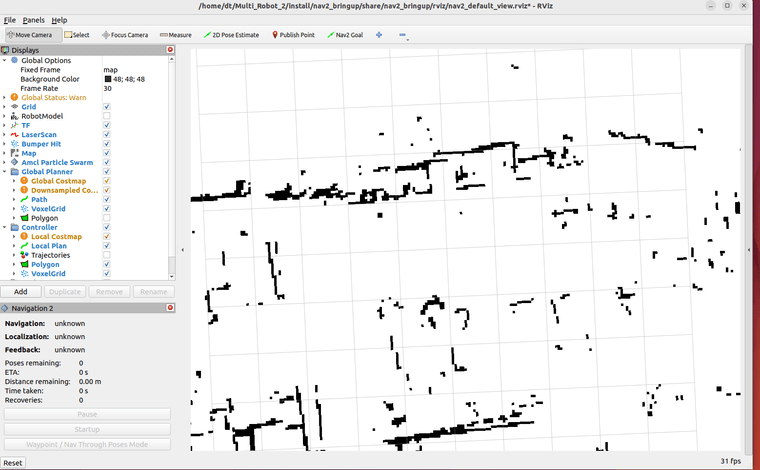
-
@1814638019 搞个 base_footprint 到 base_link 的 ,然后搞个 odom 到base_footprint
-
@小鱼 大佬感谢回答
听取你的解决方案之后我去建立了odom和base_footfrint的tf然后 nav2的配置文件由base_link改称base_footprint
终端出现下列错误[component_container_isolated-1] [INFO] [1722172152.499445926] [global_costmap.global_costmap]: Timed out waiting for transform from base_footprint to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [component_container_isolated-1] [INFO] [1722172152.518690323] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722172152.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1722172152.561808143] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 1722172151.000 for reason 'discarding message because the queue is full'tf:
topic:
-
-
@小鱼 topic 太大传不上来。rviz和之前一样
-
@1814638019 缺少map 到 odom 的映射
-
@小鱼 大佬,这个nav2是在amcl 那里map 到odom 的吗
-
@1814638019 amcl 是负责这个功能的