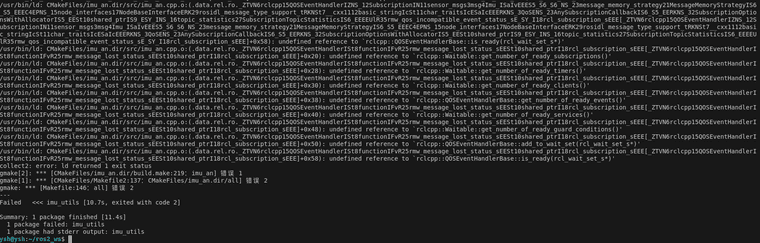
imu_utils编译到最后报连接器错误。这是我的报错和我的cmake文件,请鱼大佬帮我看一下
-
cmake_minimum_required(VERSION 2.8.3) project(imu_utils) if(POLICY CMP0057) cmake_policy(SET CMP0057 NEW) endif() ## Compile as C++11, supported in ROS Kinetic and newer set(CMAKE_BUILD_TYPE "Release") #set(CMAKE_CXX_FLAGS "-std=c++11") set(CMAKE_CXX_STANDARD 17) #-DEIGEN_USE_MKL_ALL") set(CMAKE_CXX_FLAGS_RELEASE "-O3 -Wall -g -fPIC") ## Find catkin macros and libraries ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz) ## is used, also find other catkin packages find_package(ament_cmake REQUIRED roscpp REQUIRED rclcpp REQUIRED std_msgs REQUIRED geometry_msgs REQUIRED nav_msgs REQUIRED code_utils REQUIRED ) ## System dependencies are found with CMake's conventions # find_package(Boost REQUIRED COMPONENTS system) find_package(OpenCV REQUIRED) find_package(Ceres REQUIRED) find_package(Eigen3 REQUIRED) include_directories( ${ament_INCLUDE_DIRS} ${CERES_INCLUDE_DIRS} ${EIGEN3_INCLUDE_DIR} ${code_utils_INCLUDE_DIRS} ) include_directories(/home/ysh/ros2_ws/install/code_utils/include) include_directories(/opt/ros/humble/include/cv_bridge) include_directories(/opt/ros/humble/include/sensor_msgs) include_directories(/opt/ros/humble/include/rosidl_runtime_cpp) include_directories(/opt/ros/humble/include/rosidl_runtime_c) include_directories(/opt/ros/humble/include/std_msgs) include_directories(/opt/ros/humble/include/rclcpp) include_directories(/opt/ros/humble/include/rcl) include_directories(/opt/ros/humble/include/message_filters) include_directories(/opt/ros/humble/include/builtin_interfaces) include_directories(/opt/ros/humble/include/rcutils) include_directories(/opt/ros/humble/include/rmw) include_directories(/opt/ros/humble/include/rcl_yaml_param_parser) include_directories(/opt/ros/humble/include/rosidl_typesupport_interface) include_directories(/opt/ros/humble/include/rcpputils) include_directories(/opt/ros/humble/include/tracetools) include_directories(/opt/ros/humble/include/rcl_interfaces) include_directories(/opt/ros/humble/include/libstatistics_collector) include_directories(/opt/ros/humble/include/statistics_msgs) include_directories(/opt/ros/humble/include/image_transport) include_directories(/opt/ros/humble/include/geometry_msgs) include_directories(/opt/ros/humble/include/rclcpp/rclcpp) set(ACC_LIB_SOURCE_FILES ${PROJECT_SOURCE_DIR}/src/acc_lib/allan_acc.cpp ${PROJECT_SOURCE_DIR}/src/acc_lib/fitallan_acc.cpp ) set(GYR_LIB_SOURCE_FILES ${PROJECT_SOURCE_DIR}/src/gyr_lib/allan_gyr.cpp ${PROJECT_SOURCE_DIR}/src/gyr_lib/fitallan_gyr.cpp ) add_executable(imu_an src/imu_an.cpp ${GYR_LIB_SOURCE_FILES} ${ACC_LIB_SOURCE_FILES} ) target_link_libraries(imu_an ${ament_LIBRARIES} ${OpenCV_LIBS} ${CERES_LIBRARIES} ) ament_package() -
@yuan 少引入一个包嘿嘿,还有一个报错是看你之前的文件夹重复解决啦
-
从你提供的CMake文件和错误信息来看,主要的问题可能在于链接库的配置。首先,确保你的CMake文件正确找到了所有必要的库,并且这些库在链接时都被正确引用。以下是一些可能的问题和建议的修复方法:
-
确保
ament_cmake和find_package的使用正确:- 你使用了
ament_cmake,这是ROS 2中用于构建包的标准方式。但你的find_package调用似乎混合了ROS 1和ROS 2的风格。对于ROS 2,你应该使用find_package来查找ROS 2的组件,而不是直接指定roscpp、rclcpp等,因为ament_cmake会自动处理这些。
find_package(ament_cmake REQUIRED COMPONENTS rclcpp std_msgs geometry_msgs nav_msgs # 注意:这里假设code_utils是一个ROS 2包,否则可能需要调整 code_utils )- 确保
code_utils是一个有效的ROS 2包,或者它是一个普通的C++库,并且已经通过find_package或其他方式被正确找到。
- 你使用了
-
链接库:
- 你需要确保所有使用的库都被添加到
target_link_libraries中。对于ROS 2的包,通常不需要显式添加它们的库,因为ament_target_dependencies会处理这些依赖。但是,对于非ROS 2的库(如OpenCV、Ceres、Eigen3),你需要确保它们被正确链接。
target_link_libraries(imu_an ${ament_target_dependencies(imu_an)} ${OpenCV_LIBS} ${CERES_LIBRARIES} )- 注意使用
ament_target_dependencies来自动处理ROS 2包的依赖。
- 你需要确保所有使用的库都被添加到
-
包含目录:
- 你已经包含了很多ROS的目录,但通常这些目录应该由
find_package或ament_cmake自动处理。你可以减少手动添加的路径数量,仅当find_package或ament_cmake无法自动处理时才手动添加。
- 你已经包含了很多ROS的目录,但通常这些目录应该由
-
编译选项:
- 确保编译选项适合你的项目需求。你已经设置了C++17标准,这是很好的。但是,
-g通常用于调试构建,如果你正在构建发布版本,可能不需要它。
- 确保编译选项适合你的项目需求。你已经设置了C++17标准,这是很好的。但是,
-
检查CMake输出:
- 在运行CMake时,仔细查看输出信息,特别是关于
find_package的结果。确保所有必要的包都被正确找到。
- 在运行CMake时,仔细查看输出信息,特别是关于
-
环境配置:
- 确保你的ROS 2环境已正确设置,包括工作空间、安装目录等。
-
错误消息:
- 如果可能,请提供具体的连接器错误消息,这将有助于更精确地诊断问题。
按照这些步骤检查和修改你的CMake文件,应该可以解决你遇到的问题。如果问题仍然存在,请提供更多的错误详情,以便进一步分析。
以上为生成回答,仅供参考~
-
-
@小伊 这个已解决,但是我colcon build的时候把build,install,log都删除之后再colcon build的时候就报如下错误
ysh@ysh:~/ros2_ws$ colcon build Starting >>> code_utils Finished <<< code_utils [0.44s] Starting >>> imu_utils [1.015s] WARNING:colcon.colcon_cmake.task.cmake.build:Could not build CMake package 'imu_utils' because the CMake cache has no 'CMAKE_PROJECT_NAME' variable --- stderr: imu_utils Traceback (most recent call last): File "/home/ysh/.local/lib/python3.10/site-packages/colcon_core/executor/__init__.py", line 91, in __call__ rc = await self.task(*args, **kwargs) File "/home/ysh/.local/lib/python3.10/site-packages/colcon_core/task/__init__.py", line 93, in __call__ return await task_method(*args, **kwargs) File "/usr/lib/python3/dist-packages/colcon_ros/task/catkin/build.py", line 79, in build has_install_target = await has_target(args.build_base, 'install') File "/usr/lib/python3/dist-packages/colcon_cmake/task/cmake/__init__.py", line 56, in has_target if 'Unix Makefiles' in generator: TypeError: argument of type 'NoneType' is not iterable --- Failed <<< imu_utils [0.30s, exited with code 1] Summary: 1 package finished [0.92s] 1 package failed: imu_utils 1 package had stderr output: imu_utils argument of type 'NoneType' is not iterable -
从您提供的错误信息来看,
imu_utils这个包在构建时遇到了问题,主要是因为 CMake 缓存中没有找到CMAKE_PROJECT_NAME变量,这通常意味着 CMake 没有正确配置或者 CMake 缓存文件(如CMakeCache.txt)可能已损坏或不存在。此外,还出现了一个类型错误,表明在尝试迭代一个NoneType类型的对象,这通常发生在尝试访问或操作未正确初始化的变量时。这里有几个步骤可以帮助您解决这个问题:
-
清理 CMake 缓存:
由于您已经删除了build、install和log目录,您应该确保 CMake 的缓存也被清除。在您的包目录(imu_utils)中,查找并删除任何CMakeCache.txt文件。 -
重新配置 CMake:
当您运行colcon build时,它应该会自动重新配置 CMake。但是,如果自动配置失败,您可以尝试手动运行 CMake 配置步骤。在您的包目录下(假设是imu_utils),运行:mkdir -p build cd build cmake ..注意,这可能需要您先安装 CMake(如果尚未安装),并确保 CMake 的版本与您的 ROS 2 环境兼容。
-
检查 CMakeLists.txt:
打开imu_utils的CMakeLists.txt文件,确保它包含正确设置project()命令的行,这通常位于文件的顶部。例如:cmake_minimum_required(VERSION 3.0.2) project(imu_utils) -
运行 colcon build:
在您的 ROS 2 工作空间根目录下,再次运行colcon build。 -
检查 ROS 2 和 colcon 的版本:
确保您安装的 ROS 2 和 colcon 的版本兼容。有时候,软件包的更新可能会破坏现有的构建配置。 -
查看更详细的日志:
如果问题仍然存在,您可以尝试在colcon build命令中添加--packages-select imu_utils --event-handlers console_direct+来获取更详细的构建日志,这有助于诊断问题。 -
搜索类似的错误:
在 ROS 2 社区、Stack Overflow 或其他论坛中搜索类似的错误和解决方案。
如果以上步骤都不能解决问题,您可能需要更详细地检查
imu_utils包的源代码或寻求来自该包维护者或 ROS 2 社区的帮助。
以上为生成回答,仅供参考~
-
-
@小伊 我的imu_utils在src目录下,imu_utils里面也没有build文件夹
-
如果你在使用
imu_utils这个库,并且它位于你的项目的src目录下,同时该目录下没有build文件夹,这意呀着你可能还没有进行过编译构建的过程。imu_utils是一个通常用于处理IMU(惯性测量单元)数据的工具集,它可能包含了一些C++代码,这些代码需要被编译成可执行文件或库文件才能在你的项目中使用。以下是一些步骤,你可以按照这些步骤来编译
imu_utils并确保它能够在你的项目中正确运行:1. 创建构建目录
首先,在你的
imu_utils目录(或者它的父目录,这取决于你的偏好)中创建一个名为build的新目录。这个目录将用于存放编译过程中生成的所有文件,以避免污染源代码目录。mkdir build cd build2. 配置CMake(如果适用)
如果
imu_utils是使用 CMake 作为构建系统的,你需要在build目录中运行 CMake 来配置项目。确保你的系统上已经安装了 CMake。cmake ../path/to/imu_utils注意:将
../path/to/imu_utils替换为你的imu_utils目录的实际路径。如果你的imu_utils目录就在当前目录下,那么可以使用../。3. 编译
配置完 CMake 后,你可以使用
make命令(在 Linux 或 macOS 上)或相应的命令(如 Windows 上的 Visual Studio 构建系统)来编译项目。make这个命令会根据 CMake 生成的构建文件来编译项目。
4. 使用编译后的文件
编译完成后,你的可执行文件或库文件将位于
build目录的相应子目录中(通常是bin或lib目录,但这取决于 CMakeLists.txt 的配置)。你可以将这些文件添加到你的项目中,或者直接在命令行中运行可执行文件。5. 注意事项
- 确保你的开发环境(如编译器、CMake等)已经正确安装并配置。
- 如果你在编译过程中遇到错误,检查
CMakeLists.txt文件以确保所有依赖都已正确指定,并且你的系统满足所有依赖要求。 - 如果
imu_utils是从网上下载的,确保你下载的是正确的版本,并且没有遗漏任何文件。
如果你不熟悉 CMake 或编译过程,可能需要花一些时间来学习这些工具的基础知识。不过,一旦你掌握了它们,你就可以轻松地构建和使用各种开源库和工具了。
以上为生成回答,仅供参考~
-
@小伊 按照你说的做,他现在是这样的
ysh@ysh:~/ros2_ws/src/imu_utils$ mkdir build cd build ysh@ysh:~/ros2_ws/src/imu_utils/build$ make make: *** 没有指明目标并且找不到 makefile。 停止。 ysh@ysh:~/ros2_ws/src/imu_utils/build$ cmake .. -- Found ament_cmake: 1.3.9 (/opt/ros/humble/share/ament_cmake/cmake) -- Found required Ceres dependency: Eigen version 3.4.0 in /usr/include/eigen3 -- Found required Ceres dependency: glog -- Found required Ceres dependency: gflags -- Found Ceres version: 2.0.0 installed in: /usr with components: [EigenSparse, SparseLinearAlgebraLibrary, LAPACK, SuiteSparse, CXSparse, SchurSpecializations, Multithreading] -- Configuring done -- Generating done -- Build files have been written to: /home/ysh/ros2_ws/src/imu_utils ysh@ysh:~/ros2_ws/src/imu_utils/build$ make make: *** 没有指明目标并且找不到 makefile。 停止。 ysh@ysh:~/ros2_ws/src/imu_utils/build$ make make: *** 没有指明目标并且找不到 makefile。 停止。 -
从你提供的输出来看,问题出在
make命令上,它提示“没有指明目标并且找不到makefile”。这通常意味着在build目录下没有生成Makefile文件,或者Makefile文件的路径不正确。但是,从cmake ..的输出来看,CMake 似乎已经成功运行,并且声称已经将构建文件写入到了/home/ysh/ros2_ws/src/imu_utils,这看起来是一个错误,因为通常CMake会在build目录下生成Makefile。这里有几个步骤可以帮助你解决这个问题:
-
确认CMake的输出目录:
确保CMake的输出目录确实是build目录。从输出看,它可能错误地指向了/home/ysh/ros2_ws/src/imu_utils。但通常情况下,你应该在build目录下运行CMake。如果CMake配置有误,可能需要检查CMakeLists.txt文件,看看是否有设置输出目录的指令(如set(CMAKE_BINARY_DIR ...)),但这在标准的ROS 2包中是不常见的。 -
重新在
build目录下运行CMake:
你已经在build目录下运行了CMake,但让我们再次确认。首先,确保你在build目录下,然后运行:cd ~/ros2_ws/src/imu_utils/build cmake ..注意,
cmake ..命令中的..表示CMake应该查看当前目录的上一级目录(即imu_utils目录)来查找CMakeLists.txt文件。 -
检查
build目录下的文件:
运行CMake后,检查build目录下是否生成了Makefile和其他CMake生成的文件(如CMakeCache.txt、cmake_install.cmake等)。 -
运行
make:
如果Makefile和其他文件都正确生成在build目录下,你现在应该能够运行make来编译你的项目:make -
检查
CMakeLists.txt:
如果以上步骤仍然无法解决问题,请检查imu_utils目录下的CMakeLists.txt文件,确保它正确无误地配置了项目,并且没有指向错误的目录或文件。 -
清理和重建:
如果可能,你可以尝试删除build目录并重新创建它,然后再次运行CMake和make:rm -rf ~/ros2_ws/src/imu_utils/build mkdir -p ~/ros2_ws/src/imu_utils/build cd ~/ros2_ws/src/imu_utils/build cmake .. make
如果上述步骤仍然无法解决问题,可能需要更详细地查看
CMakeLists.txt文件,或者检查是否有其他配置或环境问题影响CMake和make的执行。
以上为生成回答,仅供参考~
-
-
@小伊
这个是cmake文件cmake_minimum_required(VERSION 3.10) project(imu_utils) if(POLICY CMP0057) cmake_policy(SET CMP0057 NEW) endif() ## Compile as C++11, supported in ROS Kinetic and newer set(CMAKE_BUILD_TYPE "Release") #set(CMAKE_CXX_FLAGS "-std=c++11") set(CMAKE_CXX_STANDARD 17) #-DEIGEN_USE_MKL_ALL") set(CMAKE_CXX_FLAGS_RELEASE "-O3 -Wall -g -fPIC") ## Find catkin macros and libraries ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz) ## is used, also find other catkin packages #link_directories(/opt/ros/humble/lib) find_package(ament_cmake REQUIRED roscpp REQUIRED rclcpp REQUIRED std_msgs REQUIRED geometry_msgs REQUIRED nav_msgs REQUIRED ) ## System dependencies are found with CMake's conventions # find_package(Boost REQUIRED COMPONENTS system) find_package(OpenCV REQUIRED) find_package(Ceres REQUIRED) find_package(Eigen3 REQUIRED) include_directories( ${ament_INCLUDE_DIRS} ${CERES_INCLUDE_DIRS} ${EIGEN3_INCLUDE_DIR} ${code_utils_INCLUDE_DIRS} ) include_directories(/home/ysh/ros2_ws/install/code_utils/include) include_directories(/opt/ros/humble/include/cv_bridge) include_directories(/opt/ros/humble/include/sensor_msgs) include_directories(/opt/ros/humble/include/rosidl_runtime_cpp) include_directories(/opt/ros/humble/include/rosidl_runtime_c) include_directories(/opt/ros/humble/include/std_msgs) include_directories(/opt/ros/humble/include/rclcpp) include_directories(/opt/ros/humble/include/rcl) include_directories(/opt/ros/humble/include/message_filters) include_directories(/opt/ros/humble/include/builtin_interfaces) include_directories(/opt/ros/humble/include/rcutils) include_directories(/opt/ros/humble/include/rmw) include_directories(/opt/ros/humble/include/rcl_yaml_param_parser) include_directories(/opt/ros/humble/include/rosidl_typesupport_interface) include_directories(/opt/ros/humble/include/rcpputils) include_directories(/opt/ros/humble/include/tracetools) include_directories(/opt/ros/humble/include/rcl_interfaces) include_directories(/opt/ros/humble/include/libstatistics_collector) include_directories(/opt/ros/humble/include/statistics_msgs) include_directories(/opt/ros/humble/include/image_transport) include_directories(/opt/ros/humble/include/geometry_msgs) #include_directories(/opt/ros/humble/include/rclcpp/rclcpp) set(ACC_LIB_SOURCE_FILES ${PROJECT_SOURCE_DIR}/src/acc_lib/allan_acc.cpp ${PROJECT_SOURCE_DIR}/src/acc_lib/fitallan_acc.cpp ) set(GYR_LIB_SOURCE_FILES ${PROJECT_SOURCE_DIR}/src/gyr_lib/allan_gyr.cpp ${PROJECT_SOURCE_DIR}/src/gyr_lib/fitallan_gyr.cpp ) add_executable(imu_an src/imu_an.cpp ${GYR_LIB_SOURCE_FILES} ${ACC_LIB_SOURCE_FILES} ) target_link_libraries(imu_an ${ament_LIBRARIES} ${OpenCV_LIBS} ${CERES_LIBRARIES} ) ament_package() -
这个CMake文件是为ROS 2(或类似ROS 2环境的ament构建系统)的
imu_utils项目配置的。它主要做了以下几件事情:-
设置CMake版本和项目信息:
- 指定CMake的最低版本为3.10。
- 定义项目名为
imu_utils。 - 设置C++标准为C++17,并设置了Release模式下的编译标志。
-
依赖查找:
- 使用
find_package查找ament_cmake、ROS 2相关的包(如roscpp, rclcpp等)、OpenCV、Ceres Solver和Eigen3等依赖。 - 需要注意的是,虽然
ament_cmake的find_package语法支持链式查找依赖,但这里的示例可能略显混乱,因为ament_cmake通常用于ROS 2,而find_package(roscpp REQUIRED)等看起来更像ROS 1的语法。在ROS 2中,通常不需要单独查找roscpp等,因为它们作为ROS 2的一部分被自动处理。
- 使用
-
包含目录:
- 通过
include_directories指令添加了许多头文件的搜索路径,包括ament、Ceres、Eigen3等依赖,以及ROS 2的一些内部库和消息类型。这里有一些路径可能是不必要的,特别是如果它们已经被find_package调用隐式包含的话。
- 通过
-
源文件设置:
- 定义了加速度计(ACC_LIB_SOURCE_FILES)和陀螺仪(GYR_LIB_SOURCE_FILES)相关的源文件。
- 将这些源文件与主程序
imu_an.cpp一起添加到可执行文件imu_an中。
-
链接库:
- 使用
target_link_libraries将imu_an目标链接到所需的库,包括通过ament_LIBRARIES(这里可能不是ROS 2的标准用法,ROS 2通常不需要这样做)、OpenCV和Ceres Solver库。
- 使用
-
ament包配置:
- 调用
ament_package()来配置ament包。这是ROS 2特有的,用于创建ament兼容的包。
- 调用
改进建议:
- 依赖查找:如果这是ROS 2项目,请确保使用正确的
find_package语法来查找ROS 2相关的包。例如,find_package(rclcpp REQUIRED)是适当的,但find_package(roscpp REQUIRED)可能不是(除非你有特定的理由需要这样做,但通常不需要)。 - 包含目录:检查哪些目录是必需的,并去除不必要的
include_directories调用。通常,find_package调用会自动设置正确的包含目录。 - CMake策略:虽然你设置了CMP0057策略,但最好检查并应用所有相关的CMake策略,以确保跨不同CMake版本的兼容性。
- 代码组织:考虑将源文件按逻辑分组到不同的目录中,并在CMakeLists.txt中相应地调整路径。
- CMake变量:使用CMake变量(如
${PROJECT_SOURCE_DIR})来引用项目目录是一个好习惯,这有助于保持CMakeLists.txt的可移植性和可维护性。
以上为生成回答,仅供参考~
-
-
@yuan 你这个错误可以复制粘贴不:https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
另外工程结构展示下呗
-
@小鱼 谢谢你哦,我已经解决啦
-
@yuan 少引入一个包嘿嘿,还有一个报错是看你之前的文件夹重复解决啦
-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在
-
 小 小伊 从 中的 社区运营 移动了该主题
小 小伊 从 中的 社区运营 移动了该主题