cartographer报错
-
从你提供的错误信息来看,问题主要出现在protobuf的自动生成代码中,特别是在处理
CreateMaybeMessage和GetOwnedMessage等函数时。这些错误通常与protobuf的编译器(protoc)的版本或者protobuf库的版本与Cartographer依赖的版本不匹配有关。以下是一些可能的解决步骤:-
检查Protobuf版本:
Cartographer通常有一个推荐的protobuf版本。你需要确保你的系统上安装的protobuf版本与Cartographer的依赖相匹配。可以查看Cartographer的官方文档或者其CMakeLists.txt文件来确认这一点。你可以通过运行以下命令来检查你的protobuf版本:
protoc --version如果版本不匹配,你需要安装正确版本的protobuf。可以通过源码编译或者使用包管理器(如apt, yum, brew等)来安装。
-
清理并重新编译:
在更改protobuf版本或修复任何依赖项后,你需要彻底清理旧的编译文件,并重新编译Cartographer。你可以使用以下命令来清理:rm -rf /home/dt/cartographer_ros/build_isolated/cartographer catkin_make_isolated --install --use-ninja -
检查CMakeLists.txt:
确保Cartographer的CMakeLists.txt文件正确设置了protobuf的路径和版本。有时候,如果protobuf库安装在非标准路径下,你可能需要在CMake中指定这些路径。 -
检查环境变量:
确保你的环境变量(如LD_LIBRARY_PATH和PATH)包含了protobuf库的路径,以便编译器和链接器可以找到它们。 -
查看编译日志:
如果问题仍然存在,仔细查看编译日志可能会提供更多线索。特别注意与protobuf相关的部分,看看是否有任何关于找不到头文件或库的警告或错误。 -
更新Cartographer:
如果你正在使用的Cartographer版本较旧,尝试更新到最新版本。开发者可能已经修复了与特定protobuf版本相关的问题。 -
社区和文档:
访问Cartographer的GitHub页面、官方文档或社区论坛,看看是否有其他人遇到并解决了类似的问题。
通过上述步骤,你应该能够诊断并解决编译Cartographer时遇到的问题。如果问题仍然存在,请提供更详细的编译日志和系统信息,以便进一步分析。
以上为生成回答,仅供参考~
-
-
@小伊 我的版本是libprotoc 3.4.0网上查询是推荐版本哦
-
关于您提到的
libprotoc 3.4.0版本,它是Protocol Buffers(protobuf)编译器的一个具体版本。Protocol Buffers是由Google开发的一种数据序列化协议,广泛用于结构化数据的编组和解组,特别是在网络通信和数据存储等领域。libprotoc是protobuf的编译器库,而protoc则是protobuf编译器本身的可执行文件,用于将.proto文件转换为不同编程语言的源代码。关于libprotoc 3.4.0版本的特点和使用
-
版本兼容性:
libprotoc 3.4.0是一个特定的版本,它在发布时可能针对某些特性或修复了之前的bug。然而,需要注意的是,随着技术的发展和项目的更新,旧版本的库可能不再完全兼容新的项目需求或最新的软件环境。
-
推荐版本:
- 网上查询推荐
libprotoc 3.4.0版本可能是因为该版本在某个特定时期或特定项目中被广泛使用,并且表现稳定。然而,这并不意味着它是所有项目或所有情况下的最佳选择。选择哪个版本通常取决于项目的具体需求、依赖关系以及与其他软件的兼容性。
- 网上查询推荐
-
安装与配置:
- 安装
libprotoc 3.4.0通常涉及从Google的GitHub仓库或其他可靠的源下载相应的源代码或预编译包,并按照安装说明进行安装。 - 在安装过程中,可能需要设置环境变量(如
PATH、LD_LIBRARY_PATH等),以确保编译器和库文件能够被系统正确识别和使用。
- 安装
-
使用场景:
libprotoc 3.4.0可用于将.proto文件编译成C++、Java、Python等多种编程语言的源代码,这些源代码提供了方便的数据序列化和反序列化的API。- 它适用于需要跨平台、跨语言数据交换的项目,特别是在网络通信、数据存储等领域。
注意事项
- 版本更新:
- 由于技术不断发展,protobuf及其编译器库也会不断更新。因此,建议定期检查是否有新的版本发布,并根据项目需求进行更新。
- 兼容性测试:
- 在将
libprotoc升级或降级到不同版本时,建议进行充分的兼容性测试,以确保新版本不会破坏现有功能或引入新的问题。
- 在将
- 依赖管理:
- 如果项目依赖于多个库或框架,并且这些依赖项之间存在版本冲突,那么选择合适的
libprotoc版本可能会变得更加复杂。在这种情况下,建议使用依赖管理工具(如Maven、Gradle、pip等)来管理项目的依赖关系。
- 如果项目依赖于多个库或框架,并且这些依赖项之间存在版本冲突,那么选择合适的
总之,
libprotoc 3.4.0是一个特定版本的protobuf编译器库,它在某些情况下可能是推荐版本。然而,在选择使用哪个版本时,需要综合考虑项目的具体需求、依赖关系以及与其他软件的兼容性。
以上为生成回答,仅供参考~
-
-
@小伊 还是存在问题,有大佬能帮忙看看吗
-
当然,我很愿意帮助你解决问题,但是具体的帮助需要基于你遇到的具体问题。不过,我可以提供一些通用的步骤和建议,这些可能有助于你定位和解决问题:
-
详细描述问题:
- 首先,确保你能够清楚地描述你遇到的问题。问题发生的环境(如操作系统、使用的软件或编程语言)、出现的具体症状(如错误信息、程序崩溃、性能问题等)以及你尝试过的解决方案。
-
查看错误日志:
- 如果你的应用或系统有生成错误日志,查看这些日志可能会提供关于问题原因的线索。
-
简化问题:
- 尝试将问题简化到最小可复现的情况。这有助于确定问题的根本原因。例如,如果你在一个大型项目中遇到问题,尝试创建一个只包含问题代码的小项目。
-
搜索相似问题:
- 利用搜索引擎(如Google、Stack Overflow等)搜索你遇到的问题。很可能有人已经遇到过类似的问题,并找到了解决方案。
-
更新和兼容性检查:
- 确保你的所有软件(包括操作系统、编程语言环境、库和框架)都更新到最新版本。有时候,问题可能是由于使用了过时的软件或库导致的。
- 检查你的代码或项目是否与你正在使用的软件版本兼容。
-
代码审查:
- 仔细检查你的代码,特别是出错的部分。有时候,问题可能是由于一个小错误(如拼写错误、逻辑错误等)导致的。
-
调试:
- 使用调试工具来逐步执行你的代码,观察变量的值和程序的执行流程。这有助于你理解程序在何处出现问题。
-
请求帮助:
- 如果上述步骤都无法解决问题,你可以考虑在相关的社区或论坛上发帖求助。在请求帮助时,确保你提供了足够的信息,以便其他人能够理解你的问题并帮助你找到解决方案。
如果你能提供更多关于你遇到的问题的具体信息,我可以给出更具体的建议。希望这些通用的步骤和建议能对你有所帮助!
以上为生成回答,仅供参考~
-
-
@2388463215 这个和版本关联性很强,你需要报上各个版本号
-
@小鱼 您好,cmake 3.16.3,libprotoc 3.21.1,ros noetic,eigen3 3.3.7 ,
-
@小鱼 主机使用的是中控机x64的系统架构
-
@2388463215 代码版本呢
-
@小鱼 这个我不太清楚,不是很会看
-
@2388463215 你代码哪里来的你知道吗
-
-
@2388463215 要切换分支哇兄弟
-
@小鱼 怎么切换呢
-
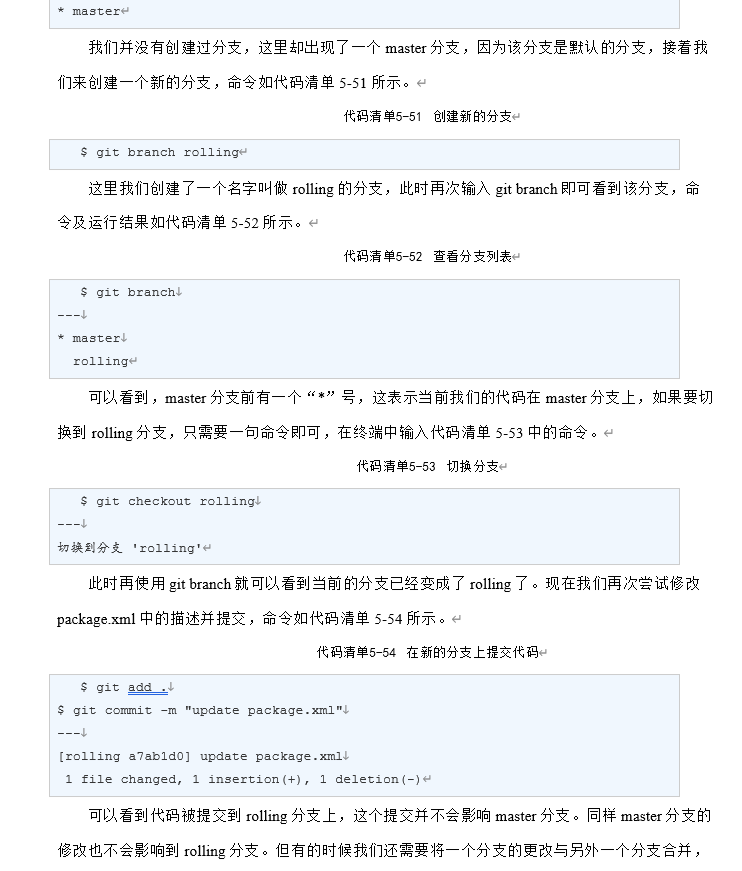
来自《ROS 2机器人开发从入门到实践》5.6.3 掌握Git分支