在动手学习ROS2-foxy版本当中的10.5.6.2当中的操作出现无法定位软件包的问题
-
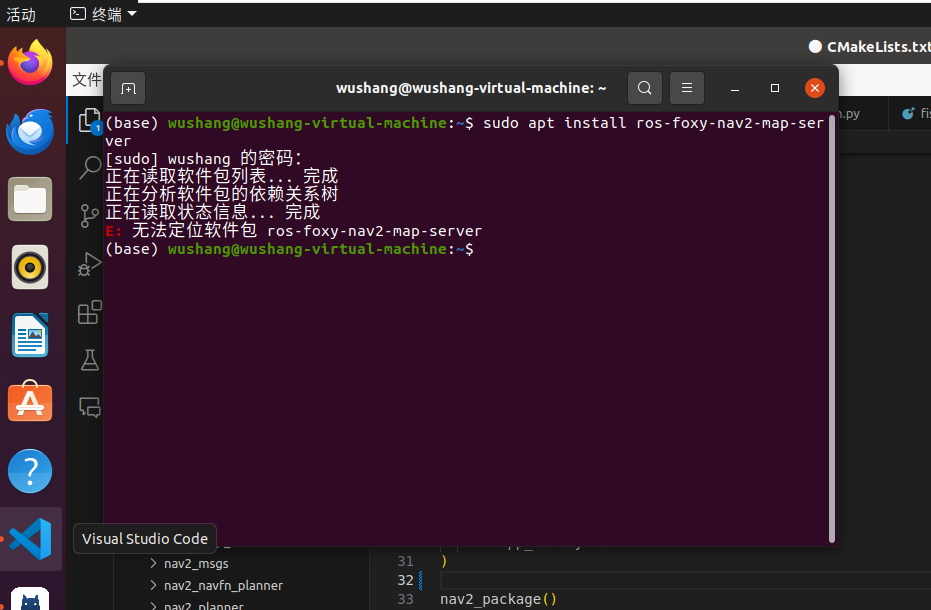

以上出现的情况为输入sudo apt install ros-foxy-nav2-map-server这行代码所导致的问题为E: 无法定位软件包 ros-foxy-nav2-map-server。本人已尝试过换源的方式都无法解决,恳求大佬们的帮助。
-
遇到
E: 无法定位软件包 ros-foxy-nav2-map-server的问题通常意味着你的ROS 2仓库中没有包含这个特定的软件包,或者你的软件包索引没有更新到包含该包的版本。以下是一些解决这个问题的步骤:-
确认ROS 2 Foxy版本已正确安装:
确保你已经成功安装了ROS 2 Foxy版本。可以通过运行ros2 --version来检查ROS 2的版本。 -
检查ROS 2仓库设置:
ROS 2的仓库配置可能不正确或未包含所有需要的包。首先,你需要确认ROS 2的仓库是否已添加到你的APT源列表中。可以使用以下命令来查看已添加的ROS 2仓库:cat /etc/apt/sources.list.d/ros2-foxy.list如果列表中没有ROS 2的仓库地址,你需要添加它们。对于Foxy版本,通常的仓库URL是(以Ubuntu为例):
sudo sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu/$(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'注意:这里使用的是
ros2-latest.list,但通常对于特定版本(如Foxy),你可能需要找到或手动创建指向Foxy版本的列表文件。 -
设置密钥:
如果你添加了新的仓库,你需要确保APT信任该仓库的密钥。对于ROS 2的仓库,你可以使用以下命令来添加密钥:curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - -
更新软件包列表:
更新你的APT软件包列表以确保它包含最新添加的仓库信息:sudo apt update -
尝试再次安装软件包:
在更新了软件包列表之后,再次尝试安装ros-foxy-nav2-map-server:sudo apt install ros-foxy-nav2-map-server -
检查软件包名称:
如果上述步骤都正确无误但问题依旧存在,可能是软件包名称有误。确认你正在尝试安装的软件包名称是否正确。你可以使用apt search ros-foxy-nav2来搜索与nav2相关的所有软件包,查看是否有nav2-map-server或类似名称的软件包。 -
检查ROS 2 Foxy的可用性:
有时候,特定的软件包可能不在所有ROS 2版本中都可用,或者可能已被移动到其他仓库或软件包名称下。检查ROS 2的官方文档或仓库以获取最新信息。 -
考虑使用源代码构建:
如果软件包在官方仓库中不可用,你可能需要从源代码构建它。这通常涉及克隆相应的GitHub仓库,并按照其README文件中的说明进行构建和安装。
希望这些步骤能帮助你解决问题!如果问题仍然存在,可能需要更详细地检查你的系统配置或寻求ROS 2社区的帮助。
以上为生成回答,仅供参考~
-
-
@1104487924 如果是学习ROS2,请换到最新的教程和书籍:https://www.bilibili.com/video/BV1GW42197Ck/ 上来,之前的动手学ROS2相关教程停止答疑,经历有限,只能维护一份,还请理解。