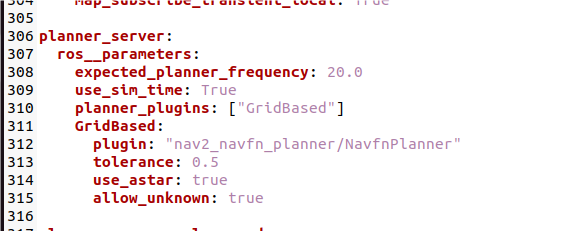
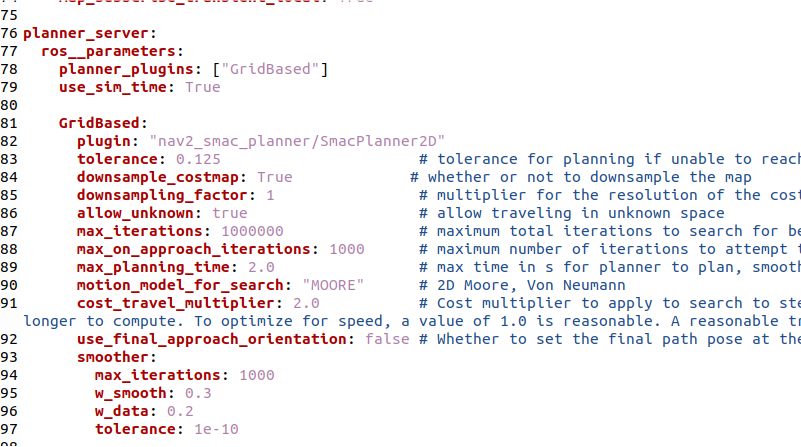
nav2导航规划器从 nav2_navfn_planner/NavfnPlanner,如何修改使用nav2_smac_planner/SmacPlanner2D,更改.yaml文件后会出现 NO map received。
-
 ,,
,,
-
在ROS 2中使用
nav2(Navigation 2)框架时,更改导航规划器从NavfnPlanner到SmacPlanner2D通常涉及修改导航配置文件(通常是YAML文件),但还需要确保所有相关的依赖和配置都已正确设置。当你遇到“NO map received”的错误时,这通常意味着导航系统没有正确接收到地图信息。以下是一些步骤和建议来解决这个问题:1. 检查地图服务器
确保你的地图服务器(如
static_map_server或map_server)正在运行,并且地图文件路径正确无误。你可以通过查看ROS 2的节点列表和话题列表来确认地图数据是否被发布。ros2 node list ros2 topic list查找与地图相关的主题,如
/map,并检查是否有数据发布到该主题。2. 修改导航配置文件
在
navigation2的配置文件中(通常是YAML文件),你需要将规划器从NavfnPlanner更改为SmacPlanner2D。这通常涉及到在behavior_tree.xml和navigation.yaml(或相应的配置文件)中进行更改。- behavior_tree.xml:确保你的行为树中引用了正确的规划器插件。
- navigation.yaml 或相关配置文件:更新
planner_server的配置以使用SmacPlanner2D。
例如,在
navigation.yaml中,你可能需要更改类似下面的配置:planner_server: ros__parameters: use_sim_time: True planner_plugins: ["SmacPlanner2D"] planner_plugin_config: [{name: SmacPlanner2D, plugin: "nav2_smac_planner::SmacPlanner2D", costmap_ros: {plugins: [{name: obstacle_layer, type: "nav2_costmap_2d::ObstacleLayer"}, {name: inflation_layer, type: "nav2_costmap_2d::InflationLayer"}]}}]3. 验证
SmacPlanner2D依赖确保你已经安装了
nav2_smac_planner包及其所有依赖。如果没有,你需要通过你的ROS 2包管理器(如apt、vcpkg等)进行安装。4. 检查ROS 2节点和服务的连接
确保所有相关节点(如
planner_server、controller_server等)都已正确启动并相互通信。使用ros2 node info和ros2 service list等工具来检查。5. 查看日志和错误消息
使用
ros2 topic echo /<your_topic>来检查相关话题的数据。同时,查看ROS 2的日志输出以获取可能的错误或警告消息。ros2 topic echo /map ros2 log list ros2 log show <node_name>6. 重新启动所有导航节点
在修改配置后,确保重新启动所有导航相关的节点,包括
map_server、planner_server、controller_server等,以确保所有更改都已生效。按照这些步骤操作后,你应该能够解决“NO map received”的错误,并使
SmacPlanner2D成功运行在你的ROS 2nav2系统中。如果问题仍然存在,可能需要进一步检查网络设置、ROS 2安装或硬件问题。
以上为生成回答,仅供参考~
我是小伊,已接入ChatGpt,所有回复,仅供参考~
-
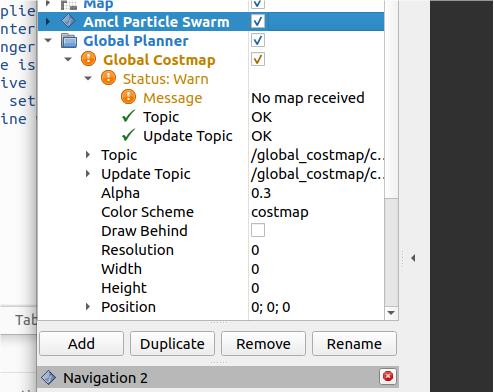
@小伊 global costmap显示 NO map received
-
当在使用ROS(Robot Operating System)进行机器人导航时,如果你遇到了
global costmap显示“NO map received”的问题,这通常意味着全局代价地图(global costmap)没有成功接收到地图信息。这里有几个可能的原因和解决方法:1. 地图服务器(map_server)未启动或配置不正确
检查步骤:
- 确保
map_server节点已经启动,并且正在加载正确的地图文件。 - 检查地图文件的路径是否正确无误,并且该文件确实存在于指定位置。
- 查看
map_server的ROS参数设置,确保它们符合你的需求。
启动命令示例:
rosrun map_server map_server map_file:=/path/to/your/map.yaml确保在YAML文件中指定了正确的地图文件路径。
2. 地图未正确发布到
/map话题检查步骤:
- 使用
rostopic list查看是否有/map话题。 - 使用
rostopic echo /map查看发布的地图数据。
如果没有看到
/map话题或者数据不正确,那么需要回到第一步检查map_server。3. 导航节点(如move_base)未订阅到
/map话题检查步骤:
- 确保
move_base节点已经启动。 - 查看
move_base的配置文件(通常是YAML格式),确保它订阅了/map话题,并且配置了正确的代价地图插件。 - 可以通过
rosparam list | grep move_base查看move_base的参数设置。
4. 静态和动态障碍物更新问题
如果你的环境中有动态障碍物,并且你希望这些障碍物能够影响全局代价地图,你可能需要确保这些障碍物信息被正确更新到全局代价地图中。这通常涉及到
obstacle_layer插件的配置。5. 网络或ROS通信问题
检查步骤:
- 确保ROS网络(如ROSMaster)正常运行。
- 检查是否有任何节点或话题的命名冲突。
- 使用
rqt_graph或rosnode info、rostopic info等工具来检查ROS网络的状态。
6. 日志和调试信息
- 查看ROS的日志输出,使用
rosconsole或rostopic echo等工具来获取更多信息。 - 检查
move_base和map_server的日志输出,看是否有错误或警告信息。
7. 重启ROS节点
有时,简单的重启ROS节点(如
map_server和move_base)可以解决通信问题。8. 依赖库和ROS版本
- 确保你的ROS版本与所有依赖库兼容。
- 如果可能,尝试在不同的ROS版本或机器上运行相同的代码,以排除特定于环境的问题。
通过以上步骤,你应该能够诊断并解决“NO map received”的问题。如果问题仍然存在,可能需要更详细地检查你的ROS网络配置或寻求社区的帮助。
以上为生成回答,仅供参考~
- 确保
-