[14个ROS版本任你选]一键安装+Docker使用指南
-
@小鱼 有没有opencv三点几版本的docker镜像
-
20 怎么安装 humble 呢
-
@1628799315 加我微信,你这个估计是用户问题,你可以登录普通用户运行吗
-
此回复已被删除! -
此回复已被删除! -
@小鱼 普通用户安装完成,docker 跑ros 项目 对性能影响大嘛???
-
“具体请看视频”视频在哪里啊?
-
@1628799315 docker 不是虚拟机,进程直接跑在宿主机,性能没影响
-
@liujun8014 b站搜 鱼香ROS
-
请问安装完的docker怎么卸载?
-
-
卸载Docker的步骤可以根据不同的操作系统和安装方式有所不同。以下是在Linux系统中(如Ubuntu和CentOS)卸载Docker的一般步骤:
对于Ubuntu和其他基于Debian的系统
-
停止Docker服务:
在卸载Docker之前,首先需要停止Docker服务。可以通过运行以下命令来实现:sudo systemctl stop docker -
卸载Docker软件包:
使用apt-get命令来卸载Docker Engine、Docker CLI和Containerd等软件包。运行以下命令:sudo apt-get purge docker-ce docker-ce-cli containerd.io -
删除Docker相关文件和目录:
为了确保Docker被完全卸载,需要删除Docker生成的数据和配置文件。这些文件通常存储在/var/lib/docker和/etc/docker目录中。可以使用以下命令来删除它们:sudo rm -rf /var/lib/docker sudo rm -rf /etc/docker注意:这些命令会永久删除Docker的镜像、容器、卷等数据,请确保已经备份了重要数据。
-
可选步骤:
如果还希望删除Docker的缓存和未使用的依赖包,可以运行以下命令:sudo apt-get autoremove sudo apt-get clean
对于CentOS和其他基于RPM的系统
-
停止Docker服务:
同样,首先需要停止Docker服务:sudo systemctl stop docker -
卸载Docker软件包:
使用yum命令来卸载Docker及其依赖包。运行以下命令:sudo yum remove docker-ce docker-ce-cli containerd.io注意:如果你的系统中安装了多个Docker相关的软件包,可能需要使用
yum list installed | grep docker来列出所有已安装的Docker软件包,并逐一卸载。 -
删除Docker相关文件和目录:
与Ubuntu系统类似,也需要删除Docker的数据和配置文件。运行以下命令:sudo rm -rf /var/lib/docker sudo rm -rf /etc/docker同时,如果
/var/lib/containerd目录存在,也可以一并删除:sudo rm -rf /var/lib/containerd -
可选步骤:
清理yum的缓存和未使用的依赖包:sudo yum autoremove sudo yum clean all
对于MacOS和Windows
- MacOS:如果你是通过Docker Desktop for Mac安装的Docker,可以通过Docker Desktop的图形界面来卸载。
- Windows:如果你是通过Docker Desktop for Windows安装的Docker,可以通过“控制面板”中的“程序和功能”来卸载。
请注意,以上步骤可能因Docker的具体版本和操作系统的不同而有所差异。在卸载之前,请确保已经备份了所有重要数据,并仔细阅读相关文档或社区提供的指南。
以上为生成回答,仅供参考~
-
-
请问如何在一键安装过程中指定端口映射呢
-
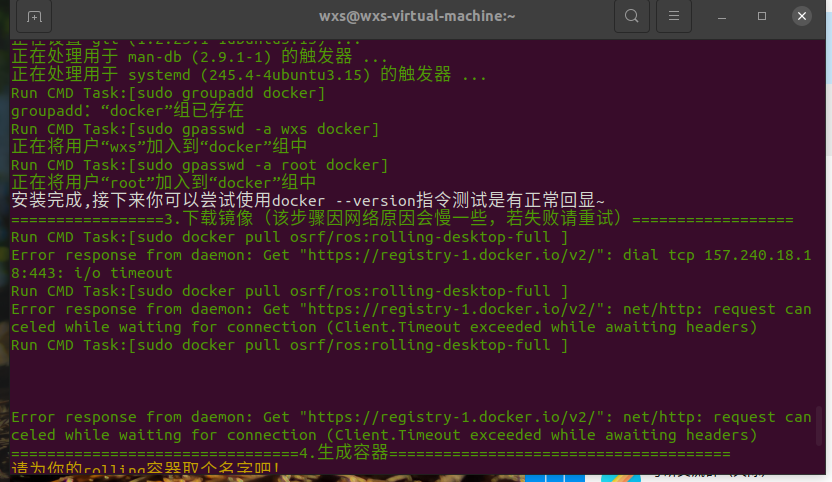 下载镜像一直出现error,有人知道为什么吗
下载镜像一直出现error,有人知道为什么吗 -
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
ROS相关:
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[3]:一键安装:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[9]:一键安装:Cartographer(18 20测试通过,16未测. updateTime 20240125)
[11]:一键安装:ROS Docker版(支持所有版本ROS/ROS2)
[16]:一键安装:系统自带ROS (!!警告!!仅供特殊情况下使用)常用软件:
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[6]:一键安装:NodeJS环境
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[10]:一键安装:微信(可以在Linux上使用的微信)
[12]:一键安装:PlateformIO MicroROS开发环境(支持Fishbot)
[15]:一键安装:QQ for Linux配置工具:
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[13]:一键配置:python国内源
[17]:一键配置: Docker代理(支持VPN+代理服务两种模式)请输入[]内的数字以选择:11
Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_ros_with_docker.py -O /tmp/fishinstall/tools/tool_install_ros_with_docker.py --no-check-certificate]
[/][0.00s] --2025-03-20 18:36:19-- http://mirror.fishros.com/install/tools/too[][0.01s] Resolving mirror.fishros.com (mirror.fishros.com)... failed: Name or[-][0.01s] CMD Result:code:4Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_vscode.py -O /tmp/fishinstall/tools/tool_install_vscode.py --no-check-certificate]
[/][0.00s] --2025-03-20 18:36:19-- http://mirror.fishros.com/install/tools/too[|][0.09s] Connecting to mirror.fishros.com (mirror.fishros.com)|47.119.165.169[-][0.09s] CMD Result:successRun CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_docker.py -O /tmp/fishinstall/tools/tool_install_docker.py --no-check-certificate]
[/][0.00s] --2025-03-20 18:36:20-- http://mirror.fishros.com/install/tools/too[|][0.06s] Connecting to mirror.fishros.com (mirror.fishros.com)|47.119.165.169[-][0.06s] CMD Result:success检测到程序发生异常退出,请打开:https://fishros.org.cn/forum 携带如下内容进行反馈
标题:使用一键安装过程中遇到程序崩溃
Traceback (most recent call last): File "/tmp/fishinstall/install.py", line 134, in <module> main() File "/tmp/fishinstall/install.py", line 123, in main run_tool_file(tools[code]['tool'].replace("/",".")) File "/tmp/fishinstall/tools/base.py", line 1473, in run_tool_file tool = importlib.import_module(file.replace(".py","")).Tool() AttributeError: module 'tools.tool_install_ros_with_docker' has no attribute 'Tool'本次运行详细日志文件已保存至 /tmp/fishros_install.log
检测到本次运行出现失败命令,直接退出按Ctrl+C,按任意键上传日志并退出
-
安装ROS docker时第一步报错
robot@WP:~$ wget http://fishros.com/install -O fishros && . fishros
--2025-07-16 18:18:43-- http://fishros.com/install
正在解析主机 fishros.com (fishros.com)... 47.119.165.169
正在连接 fishros.com (fishros.com)|47.119.165.169|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 301 Moved Permanently
位置:http://fishros.com/install/ [跟随至新的 URL]
--2025-07-16 18:18:44-- http://fishros.com/install/
再次使用存在的到 fishros.com:80 的连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 960 [application/octet-stream]
正在保存至: ‘fishros’fishros 100%[===================>] 960 --.-KB/s 用时 0s
2025-07-16 18:18:44 (76.2 MB/s) - 已保存 ‘fishros’ [960/960])
[sudo] robot 的密码:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树... 完成
正在读取状态信息... 完成
python3-distro 已经是最新版 (1.7.0-1)。
python3-yaml 已经是最新版 (5.4.1-1ubuntu1)。
升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 249 个软件包未被升级。
--2025-07-16 18:18:47-- http://mirror.fishros.com/install/tools/base.py
正在解析主机 mirror.fishros.com (mirror.fishros.com)... 47.119.165.169
正在连接 mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 51510 (50K) [application/octet-stream]
正在保存至: ‘/tmp/fishinstall//tools/base.py’/tmp/fishinstall//t 100%[===================>] 50.30K --.-KB/s 用时 0.09s
2025-07-16 18:18:47 (542 KB/s) - 已保存 ‘/tmp/fishinstall//tools/base.py’ [51510/51510])
Run CMD Task:[dpkg --print-architecture]
[-][0.00s] CMD Result:successRun CMD Task:[wget http://mirror.fishros.com/install/tools/translation/translator.py -O /tmp/fishinstall//tools/translation/translator.py --no-check-certificate]
[/][0.00s] --2025-07-16 18:18:48-- http://mirror.fishros.com/install/tools/tran[][0.10s] 正在解析主机 mirror.fishros.com (mirror.fishros.com)... 47.119.165.16[|][0.10s] 正在连接 mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80..[-][0.10s] CMD Result:successRun CMD Task:[wget http://mirror.fishros.com/install/tools/translation/assets/zh_CN.py -O /tmp/fishinstall//tools/translation/assets/zh_CN.py --no-check-certificate]
[/][0.00s] --2025-07-16 18:18:48-- http://mirror.fishros.com/install/tools/tran[][0.10s] 正在解析主机 mirror.fishros.com (mirror.fishros.com)... 47.119.165.16[|][0.10s] 正在连接 mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80..[-][0.10s] CMD Result:successRun CMD Task:[wget http://mirror.fishros.com/install/tools/translation/assets/en_US.py -O /tmp/fishinstall//tools/translation/assets/en_US.py --no-check-certificate]
[/][0.00s] --2025-07-16 18:18:49-- http://mirror.fishros.com/install/tools/tran[][0.10s] 正在解析主机 mirror.fishros.com (mirror.fishros.com)... 47.119.165.16[|][0.10s] 正在连接 mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80..[-][0.10s] CMD Result:successRun CMD Task:[wget https://fishros.org.cn/forum/topic/1733 -O /tmp/t1733 -q --timeout 10 && rm -rf /tmp/t1733]
[-][0.00s] CMD Result:success已为您切换语言至当前所在国家语言:zh_CN
基础检查通过...======欢迎使用一键安装工具,人生苦短,三省吾身,省时省力省心!=======
======一键安装已开源,请放心使用:https://github.com/fishros/install =======.-~~~~~~~~~-._ _.-~~~~~~~~~-. __.' ~. .~ `.__ .'// 开卷有益 \./ 书山有路 \ `. .'// 可以多看看小鱼的文章 | 关注B站鱼香ROS机器人 \ `. .'// .-~~~~~~~~~~~~~~-._ | _,-~~~~~~~~~~~. \`. .'//.-" `-. | .-' "-.\`. .'//______.============-.. \ | / ..-============.______\`. .'______________________________\|/______________________________` ----------------------------------------------------------------------RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
ROS相关:
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[3]:一键安装:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[9]:一键安装:Cartographer(18 20测试通过,16未测. updateTime 20240125)
[11]:一键安装:ROS Docker版(支持所有版本ROS/ROS2)
[16]:一键安装:系统自带ROS (!!警告!!仅供特殊情况下使用)常用软件:
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[6]:一键安装:NodeJS环境
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[10]:一键安装:微信(可以在Linux上使用的微信)
[12]:一键安装:PlateformIO MicroROS开发环境(支持Fishbot)
[15]:一键安装:QQ for Linux配置工具:
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[13]:一键配置:python国内源
[17]:一键配置: Docker代理(支持VPN+代理服务两种模式)请输入[]内的数字以选择:11
Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_ros_with_docker.py -O /tmp/fishinstall/tools/tool_install_ros_with_docker.py --no-check-certificate]
[-][0.12s] CMD Result:success py’.. 已连接。os_with_docker.pyRun CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_vscode.py -O /tmp/fishinstall/tools/tool_install_vscode.py --no-check-certificate]
[-][0.10s] CMD Result:success 80... 已连接。scode.pyRun CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_docker.py -O /tmp/fishinstall/tools/tool_install_docker.py --no-check-certificate]
[-][0.11s] CMD Result:success 80... 已连接。ocker.py欢迎使用一键安装ROS-Docker版,支持所有版本ROS,本工具由作者小鱼提供
================================1.版本选择======================================
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:jazzy (ROS2)
[2]:noetic (ROS1)
[3]:humble (ROS2)
[4]:foxy (ROS2)
[5]:galactic (ROS2)
[6]:iron (ROS2)
[7]:melodic (ROS1)
[8]:rolling (ROS2)
[9]:kinetic (ROS1)
[10]:eloquent (ROS2)
[11]:dashing (ROS2)
[12]:crystal (ROS2)
[13]:bouncy (ROS2)
[14]:ardent (ROS2)
[15]:lunar (ROS2)
[16]:indigo (ROS1)
0:quit
请输入[]内的数字以选择:2
你选择了noetic(ROS1),该版本目前状态:长期支持
================================2.安装Docker======================================
Run CMD Task:[docker version]
[-][0.00s] CMD Result:code:127 -
root@hedda-OMEN-by-HP-Gaming-Laptop-16-wf0xxx:/home/hedda# rosrun turtlesim turtlesim_node
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[ INFO] [1757081474.599253221]: Starting turtlesim with node name /turtlesim
[ INFO] [1757081474.601617063]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]
Driver does not support the 0xa788 PCI ID.
libGL error: failed to create dri screen
libGL error: failed to load driver: iris
Driver does not support the 0xa788 PCI ID.
libGL error: failed to create dri screen
libGL error: failed to load driver: iris
QXcbConnection: XCB error: 2 (BadValue), sequence: 502, resource id: 500, major code: 130 (Unknown), minor code: 3
QXcbConnection: XCB error: 2 (BadValue), sequence: 505, resource id: 500, major code: 130 (Unknown), minor code: 3
root@hedda-OMEN-by-HP-Gaming-Laptop-16-wf0xxx:/home/hedda# rosrun turtlesim turtlesim_node
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[ INFO] [1757081541.675609002]: Starting turtlesim with node name /turtlesim
[ INFO] [1757081541.679264272]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]
Driver does not support the 0xa788 PCI ID.
libGL error: failed to create dri screen
libGL error: failed to load driver: iris
Driver does not support the 0xa788 PCI ID.
libGL error: failed to create dri screen
libGL error: failed to load driver: iris
QXcbConnection: XCB error: 2 (BadValue), sequence: 502, resource id: 500, major code: 130 (Unknown), minor code: 3
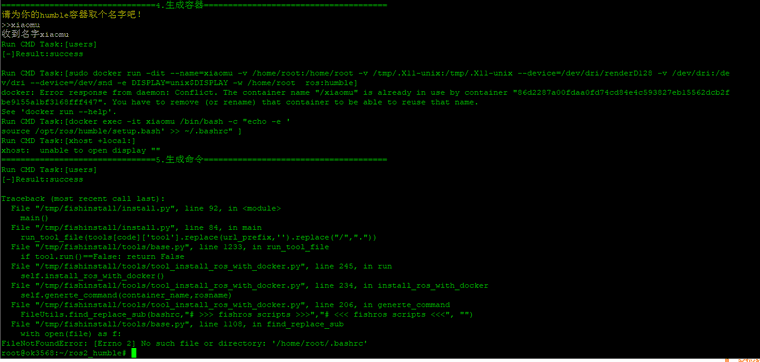
QXcbConnection: XCB error: 2 (BadValue), sequence: 505, resource id: 500, major code: 130 (Unknown), minor code: 3我这个在运行小乌龟的时候出现好像开头这个root用户没有权限访问我的当前用户的图形显示服务,和视频里面 的反应不一样,我的版本都是一样的。
这个具体要如何解决勒? -
安装好后,在VScode中连接不到容器:报错显示如下:
Retrying to download VS Code Server. [2069 ms] TypeError: Failed to fetch at I (vscode-file://vscode-app/usr/share/code/resources/app/out/vs/workbench/workbench.desktop.main.js:123:20340)