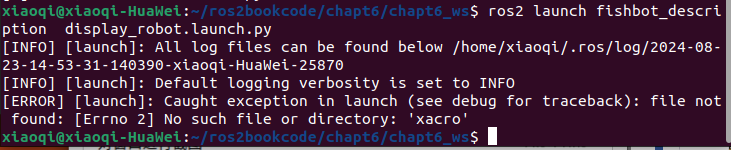
在运行ros2 launch fishbot_description display_robot.launch.py 命令时报错
-
-
在ROS 2中遇到
ros2 launch命令的错误时,可能有几个常见的原因。针对你提到的ros2 launch fishbot_description display_robot.launch.py命令,以下是一些可能的问题及其解决方案:1. 检查Python脚本是否正确
确保
display_robot.launch.py文件存在且语法正确。检查文件路径是否正确,以及Python脚本中的语法和ROS 2 Launch文件的语法是否符合要求。2. 检查Python依赖
确保所有必需的Python包都已安装。特别是与ROS 2 Launch相关的包,如
launch和launch_ros。你可以使用pip或apt(取决于你的ROS 2安装方式)来安装这些包。3. 检查ROS 2环境
确保你的ROS 2环境已正确设置。这包括设置了正确的ROS 2工作空间,并且
source了相应的setup.bash(或setup.zsh等,取决于你的shell)。4. 检查ROS 2包是否已构建
确保包含
display_robot.launch.py的ROS 2包(在这个例子中是fishbot_description)已经被构建。你可以使用colcon build --packages-select fishbot_description来构建这个包。5. 查看错误消息
详细查看命令运行时的错误消息,它通常会给出问题的具体提示。错误可能是关于缺失的依赖项、配置问题或文件路径问题。
6. 检查URDF/XACRO文件
如果
display_robot.launch.py文件中引用了URDF或XACRO文件,请确保这些文件也存在且语法正确。同时,确保它们被正确地包含在ROS 2包中,并且路径在Launch文件中被正确引用。7. 使用正确的ROS 2版本
确保你的ROS 2版本与你的Launch文件兼容。有时,Launch文件的语法在不同版本的ROS 2中会有所不同。
8. 权限问题
确保你有足够的权限来访问和执行相关文件和目录。
示例解决步骤
- 检查
display_robot.launch.py文件是否存在且语法正确。 - 在你的ROS 2工作空间中,运行
colcon build --packages-select fishbot_description来构建包。 - 重新打开终端,确保ROS 2环境已正确设置(
source install/setup.bash)。 - 运行
ros2 launch fishbot_description display_robot.launch.py,并仔细查看任何错误消息。
如果问题仍然存在,请提供具体的错误消息,以便进行更详细的诊断。
以上为生成回答,仅供参考~
- 检查
-
@小伊 我也是存在这个问题,包明明存在,就是显示找不到包
-
当你遇到“包明明存在,但显示找不到包”的问题时,这通常是由几个常见原因引起的。以下是一些排查和解决这个问题的步骤:
-
检查包管理器配置:
- 如果你使用的是Maven或Gradle等构建工具,确保你的
pom.xml(对于Maven)或build.gradle(对于Gradle)文件中的依赖项配置正确无误。 - 检查是否有任何拼写错误或版本号错误。
- 确保你的仓库设置(repositories)包含了包含该包的远程仓库地址。
- 如果你使用的是Maven或Gradle等构建工具,确保你的
-
清理和重新构建项目:
- 有时候,IDE或构建工具可能会因为缓存或旧数据而导致问题。尝试清理并重新构建你的项目。
- 对于Maven,你可以在命令行中运行
mvn clean install。 - 对于Gradle,可以使用
gradle clean build。
-
检查IDE设置:
- 确保你的IDE(如IntelliJ IDEA, Eclipse等)正确配置了项目的构建路径和依赖库。
- 在IDE中尝试重新加载Maven/Gradle项目。
- 检查IDE是否使用了正确的JDK版本。
-
网络问题:
- 确保你的计算机可以访问包含该包的远程仓库。
- 尝试访问仓库URL,看看是否可以直接下载包。
-
依赖冲突:
- 有时候,包之间的依赖冲突可能导致某些包无法被正确解析或加载。检查是否有任何版本冲突。
- 使用Maven的
mvn dependency:tree或Gradle的gradle dependencies命令来查看项目的依赖树。
-
检查本地仓库:
- 检查你的本地仓库(通常是用户目录下的
.m2/repository对于Maven,或GRADLE_USER_HOME/caches对于Gradle)是否包含了完整的包。 - 如果本地仓库中的包损坏或不完整,尝试删除它并重新构建项目,以便从远程仓库重新下载。
- 检查你的本地仓库(通常是用户目录下的
-
IDE插件或扩展:
- 如果你使用的是IDE插件(如Maven或Gradle插件),确保它们是最新版本,并且与你的IDE版本兼容。
-
查看错误日志:
- 仔细检查IDE或构建工具的输出日志,看是否有更详细的错误信息或提示。
如果以上步骤都不能解决问题,你可能需要更详细地查看项目的具体配置或寻求来自社区的帮助。在寻求帮助时,提供尽可能详细的信息(如IDE版本、构建工具版本、依赖配置等)将有助于他人更快地诊断问题。
以上为生成回答,仅供参考~
-
-
@3033454014 如果你的xacro是按照书上写的cat的话,那么就在cat后加一个空格。书上的那个cat之后有个空格,我是真心没看来。
-
@3192259003 在 在运行ros2 launch fishbot_description display_robot.launch.py 命令时报错 中说:
@3033454014 如果你的xacro原来是按照书上写的cat的话,那么就在cat后加一个空格。书上的那个cat之后有个空格,我是真心没看来。
-
@3033454014 书上的安装xacro依赖这步要做哇