教材6.3代码
-
书本6.3节无法显示机器人模型,错误如下
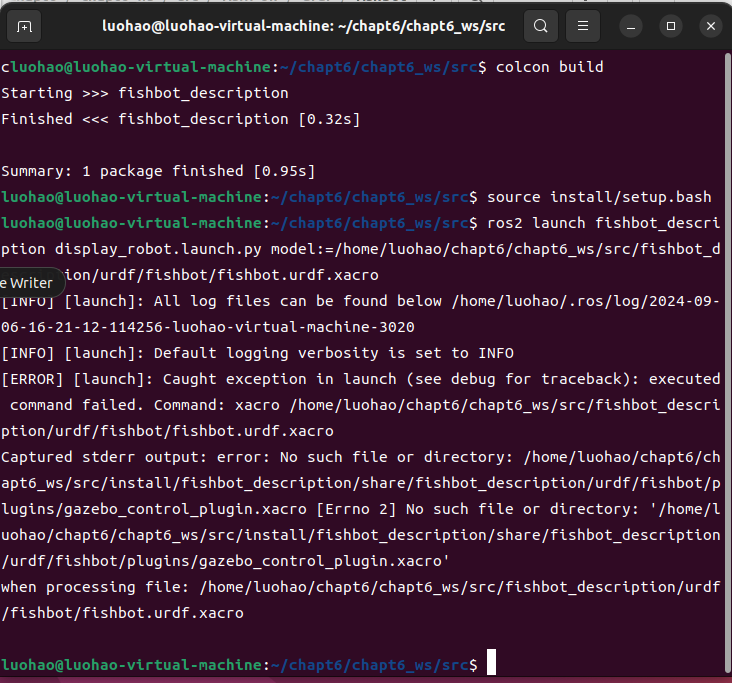
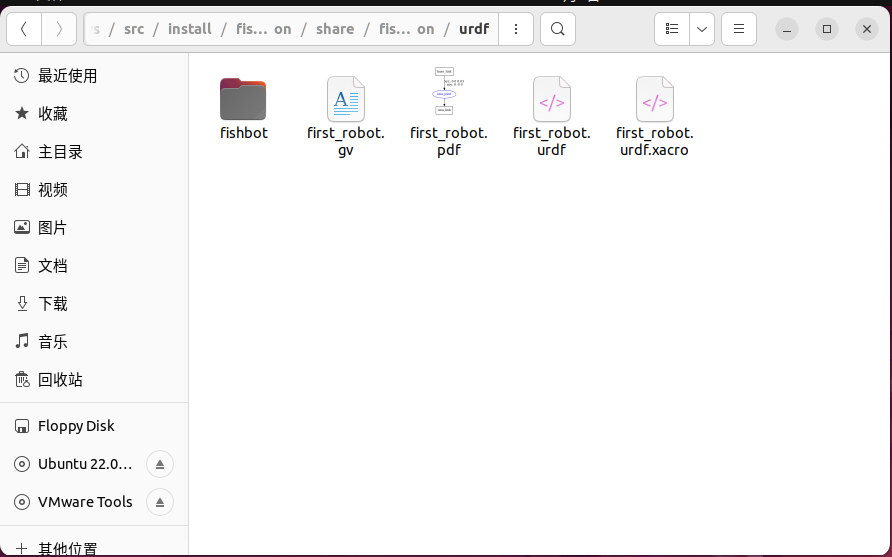
找过,确实没有那个文件,但是不知道怎么得到
构建功能包后没有哪个文件
此为launch代码
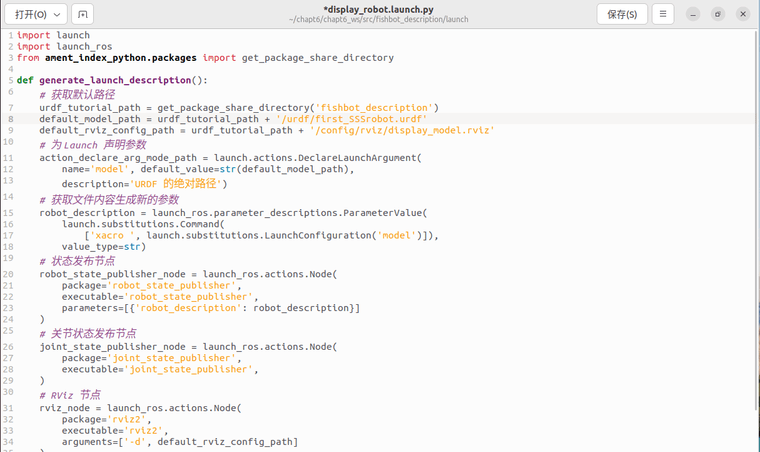
-
当你在使用ROS(Robot Operating System)时,遇到
launch文件无法找到指定的机器人模型文件(如URDF或Xacro文件)的问题,通常是因为文件路径不正确、文件未正确生成或未放置在预期的位置。以下是一些步骤和建议,帮助你解决这个问题:1. 检查文件路径
首先确保你的
launch文件中引用的机器人模型文件路径是正确的。检查是否有拼写错误或者路径错误。例如,如果你的模型文件名为my_robot.urdf.xacro,并且它位于your_package/urdf/目录下,那么你的launch文件中的路径应该是这样的(假设你使用的是<param>标签来设置robot_description参数):<param name="robot_description" command="$(find your_package)/urdf/xacro.py '$(find your_package)/urdf/my_robot.urdf.xacro'" />2. 确认文件存在
使用ROS的文件查找工具(如
rospack find your_package)来确认你的包和文件确实存在于预期的位置。你可以通过命令行进入你的包目录,并检查urdf文件夹中是否包含my_robot.urdf.xacro文件。3. 编译工作空间
确保你已经正确编译了你的ROS工作空间。你可以使用
catkin_make(对于较旧的ROS版本)或colcon build(对于ROS 2)来编译你的工作空间。编译过程会生成或更新一些必要的文件,包括可能需要的CMake配置或Python脚本。4. 检查
CMakeLists.txt和package.xml确保你的
CMakeLists.txt文件正确地包含了安装URDF文件的指令。对于URDF文件,你可能需要在CMakeLists.txt中添加类似以下的安装命令:install(FILES urdf/my_robot.urdf.xacro DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/urdf )同时,确保
package.xml文件中声明了对xacro的依赖(如果使用了Xacro):<build_depend>xacro</build_depend> <exec_depend>xacro</exec_depend>5. 重新启动ROS节点
有时候,简单的重启ROS节点或整个ROS环境可以解决路径或依赖问题。
6. 查看ROS日志
运行ROS节点时,使用
roscore和roslaunch命令,并观察是否有任何错误信息输出到终端或ROS日志中。这些信息可能会给出为什么无法找到文件的线索。7. 权限问题
确保你的ROS工作空间和其中的文件具有正确的读写权限。
按照这些步骤操作后,你应该能够解决在
launch文件中无法找到机器人模型文件的问题。如果问题仍然存在,请检查你的ROS版本和依赖库是否是最新的,或者是否有其他特定的配置问题。
以上为生成回答,仅供参考~
-
@3337489620 你点开目录进去,肯定没有这个文件:
https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答 -
@小伊 确实没有啊,这个文件怎么构造出来的呢
-
当您发现某个文件存在但不清楚它是如何被构造或创建的,这可能是由于多种原因造成的。以下是一些可能的情况和相应的解决步骤,以帮助您理解这个文件的来源和构造方式:
-
程序自动生成:
- 许多软件或程序在运行过程中会自动生成文件。这些文件可能用于存储临时数据、日志文件、配置文件等。检查最近运行的程序或软件,看是否有可能是它们生成的。
-
用户操作:
- 您或其他人可能无意中(或有意地)创建了该文件。比如,通过某个应用程序的保存功能,或者在命令行中执行了某些命令。
-
外部来源:
- 文件可能通过外部设备(如USB驱动器、网络共享等)复制到您的计算机上。
- 如果您的计算机连接到互联网,文件也可能是从网络下载或通过电子邮件附件接收的。
-
病毒或恶意软件:
- 某些病毒或恶意软件会创建文件作为它们活动的一部分。使用防病毒软件进行全面扫描以检查是否有恶意软件感染。
-
系统恢复或备份:
- 如果您最近从备份中恢复了文件或系统,那么该文件可能是从备份中恢复的。
-
检查文件属性和历史:
- 在文件上右键点击,选择“属性”,查看文件的创建日期、修改日期和访问日期。这些信息可能提供关于文件何时以及如何被创建的线索。
- 如果您的操作系统或文件管理器支持,您还可以查看文件的版本历史(如果可用),以了解文件内容的变更历史。
-
使用文件分析工具:
- 某些专门的文件分析工具(如TrID、FileAnalyzer等)可以帮助您识别文件的类型和可能的来源。这些工具通过分析文件的头信息或内容模式来工作。
-
搜索相似文件:
- 在互联网上搜索文件名或文件内容的一部分,看看是否有其他人报告了相同的文件。这可能会揭示文件的用途或来源。
-
联系技术支持:
- 如果您使用的是商业软件或服务,并且该文件与该软件或服务相关,联系技术支持以获取帮助。
通过上述步骤,您应该能够更清楚地了解这个文件的来源和它是如何被构造的。如果文件看起来是可疑的或您不确定它的用途,请务必谨慎处理,避免潜在的安全风险。
以上为生成回答,仅供参考~
-
-