ROS2机器人开发书籍P184的6.4.1安装gazebo后无法启动
-
问题描述:
ROS2机器人开发书籍P184的6.4.1安装gazebo后无法启动具体细节和上下文:
书籍《ROS2机器人开发》3D加速启动不了
总是弹出
gazebo启动不了
liu@liu-VirtualBox:~$ sudo apt install gazebo
[sudo] liu 的密码:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树... 完成
正在读取状态信息... 完成
下列软件包是自动安装的并且现在不需要了:
libavdevice-dev libavfilter-dev libbsd-dev libccd-dev libdart-dev
libdart-external-convhull-3d-dev libdart-external-odelcpsolver-dev
libfcl-dev libfreeimage-dev libgts-dev libignition-common3-av-dev
libignition-common3-av3 libignition-common3-core-dev libignition-common3-dev
libignition-common3-events3 libignition-common3-graphics-dev
libignition-common3-graphics3 libignition-common3-profiler3
libignition-fuel-tools4-dev libignition-msgs5-dev libignition-transport8-dev
libmd-dev libnorm-dev libogre-1.9-dev libpgm-dev libpostproc-dev
libprotobuf-dev libprotobuf-lite23 libprotoc-dev libprotoc23 libqwt-qt5-dev
libsdformat9-dev libsimbody-dev libsodium-dev libtar-dev
libtinyobjloader-dev libzip-dev libzmq3-dev protobuf-compiler
ros-humble-gazebo-msgs
使用'sudo apt autoremove'来卸载它(它们)。
将会同时安装下列软件:
gazebo-common gazebo-plugin-base
建议安装:
gazebo-doc
下列【新】软件包将被安装:
gazebo gazebo-common gazebo-plugin-base
升级了 0 个软件包,新安装了 3 个软件包,要卸载 0 个软件包,有 42 个软件包未被升级。
需要下载 42.0 MB 的归档。
解压缩后会消耗 103 MB 的额外空间。
您希望继续执行吗? [Y/n] y
获取:1 http://mirrors.ustc.edu.cn/ubuntu jammy/universe amd64 gazebo-common all 11.10.2+dfsg-1 [35.7 MB]
获取:2 http://mirrors.ustc.edu.cn/ubuntu jammy/universe amd64 gazebo amd64 11.10.2+dfsg-1 [4,095 kB]
获取:3 http://mirrors.ustc.edu.cn/ubuntu jammy/universe amd64 gazebo-plugin-base amd64 11.10.2+dfsg-1 [2,165 kB]
已下载 42.0 MB,耗时 5分 1秒 (140 kB/s)
正在选中未选择的软件包 gazebo-common。
(正在读取数据库 ... 系统当前共安装有 244482 个文件和目录。)
准备解压 .../gazebo-common_11.10.2+dfsg-1_all.deb ...
正在解压 gazebo-common (11.10.2+dfsg-1) ...
正在选中未选择的软件包 gazebo。
准备解压 .../gazebo_11.10.2+dfsg-1_amd64.deb ...
正在解压 gazebo (11.10.2+dfsg-1) ...
正在选中未选择的软件包 gazebo-plugin-base。
准备解压 .../gazebo-plugin-base_11.10.2+dfsg-1_amd64.deb ...
正在解压 gazebo-plugin-base (11.10.2+dfsg-1) ...
正在设置 gazebo-common (11.10.2+dfsg-1) ...
正在设置 gazebo-plugin-base (11.10.2+dfsg-1) ...
正在设置 gazebo (11.10.2+dfsg-1) ...
正在处理用于 desktop-file-utils (0.26-1ubuntu3) 的触发器 ...
正在处理用于 hicolor-icon-theme (0.17-2) 的触发器 ...
正在处理用于 gnome-menus (3.36.0-1ubuntu3) 的触发器 ...
正在处理用于 man-db (2.10.2-1) 的触发器 ...
正在处理用于 mailcap (3.70+nmu1ubuntu1) 的触发器 ...
liu@liu-VirtualBox:~$ gazebo
^Cescalating to SIGKILL on server
liu@liu-VirtualBox:~$ mkdir -p ~/.gazebo
liu@liu-VirtualBox:~$ cd ~/.gazebo
liu@liu-VirtualBox:~/.gazebo$ git clone https://gitee.com/ohhuo/gazebo_models.git ~/.gazebo/models
正克隆到 '/home/liu/.gazebo/models'...
remote: Enumerating objects: 9586, done.
remote: Total 9586 (delta 0), reused 0 (delta 0), pack-reused 9586
接收对象中: 100% (9586/9586), 826.69 MiB | 479.00 KiB/s, 完成.
处理 delta 中: 100% (4808/4808), 完成.
正在更新文件: 100% (1633/1633), 完成.
liu@liu-VirtualBox:~/.gazebo$ rm -rf ~/.gazebo/models/.git
liu@liu-VirtualBox:~/.gazebo$ gazebo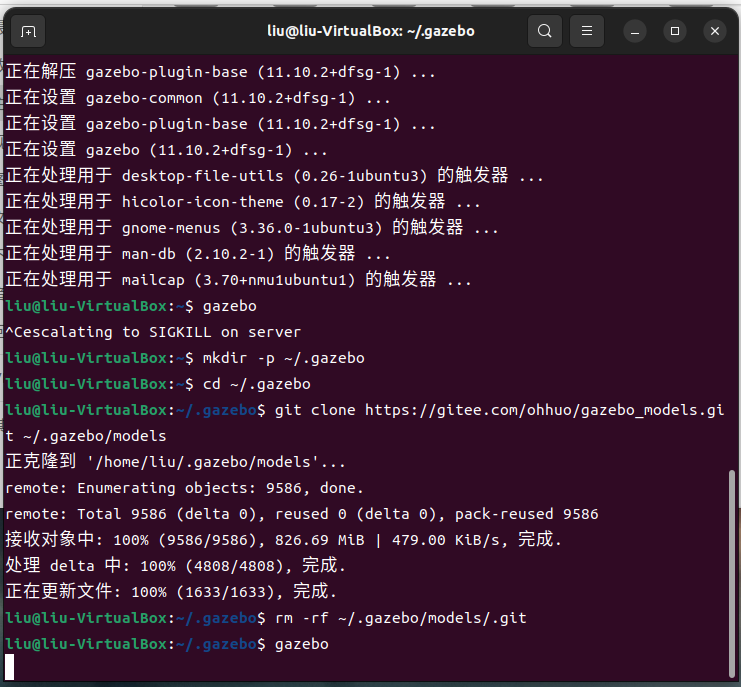
一直卡在这个界面,不报错也无法正常启动尝试过的解决方法:
直接点击打开gazebo,界面卡顿无法正常启动
使用killall gzserver
sudo apt-get update
sudo apt-get upgrade
echo "export SVGA_VGPU10=0" >> ~/.bashrcgazebo依旧无响应打不开
-
针对您描述的Gazebo无法启动的问题,我们可以尝试一些常见的解决步骤来排查和解决问题。以下是一些建议的解决步骤:
-
检查Gazebo日志:
首先,查看Gazebo的日志文件可能会提供一些有用的信息。通常,这些日志文件位于~/.gazebo/logs目录下。检查最新的日志文件,看是否有错误或警告信息。 -
确认Gazebo版本与ROS 2版本的兼容性:
确保您安装的Gazebo版本与您的ROS 2版本兼容。您提到的书籍可能基于一个较早的ROS 2版本,而您安装的可能是最新的Gazebo版本。查看ROS 2的官方文档或社区论坛以确认兼容性。 -
尝试以无图形界面模式运行Gazebo:
在终端中运行gazebo --verbose,这将以详细模式启动Gazebo,可能会输出更多有用的调试信息。如果仍然无法启动,尝试在无图形界面(例如通过SSH)中运行,以排除图形驱动或配置问题。 -
检查图形驱动:
由于您提到“3D加速启动不了”,这可能与您的图形驱动有关。确保您的图形驱动是最新的,并且与您的系统兼容。在Ubuntu上,您可以使用ubuntu-drivers autoinstall来安装推荐的驱动程序。 -
检查系统资源:
确保您的系统有足够的内存和处理器资源来运行Gazebo。Gazebo是一个资源密集型的应用程序,特别是在加载复杂模型时。 -
重新安装Gazebo:
如果上述步骤都无法解决问题,尝试卸载然后重新安装Gazebo。可以使用以下命令:sudo apt-get remove --purge gazebo* sudo apt-get autoremove sudo apt-get update sudo apt-get install gazebo -
检查环境变量:
虽然您已经尝试设置了一个环境变量,但请确保没有其他环境变量可能影响Gazebo的运行。您可以在终端中运行env来查看当前的环境变量。 -
查看社区和论坛:
访问ROS 2和Gazebo的官方论坛、GitHub问题跟踪器或Stack Overflow等社区,查看是否有其他用户遇到并解决了类似的问题。 -
使用虚拟机或Docker:
如果问题依旧无法解决,考虑在虚拟机或Docker容器中运行ROS 2和Gazebo,这可以排除许多与系统配置相关的问题。
希望这些步骤能帮助您解决问题!如果问题仍然存在,请提供更多的日志信息或详细描述,以便进一步分析。
以上为生成回答,仅供参考~
-
-
@niuniu36 虚拟机跑gazebo确实不太好整,看看书上推荐的fishros2os吧
-
@小鱼 请问为什么书上的虚拟机就可以呢?
-
@niuniu36 这个跟电脑有很大原因,不能一概而论,原因太多了,我推荐的fishros2os不是虚拟机,是装在外部固态的双系统