《动手学Moveit2》1.引言
-
1.引言
你可能不知道,你平时用的微波炉、冰箱等家电其实是机器人生产的。目前世界上运用最广的机器人其实并不是轮式的,而是工业机器人,也就是你常听说的机械臂。
因为机械臂可以像人的手一样到达空间中的各种姿态,并且可以实现很高(亚毫米)的精度,因此其应用非常的广泛。
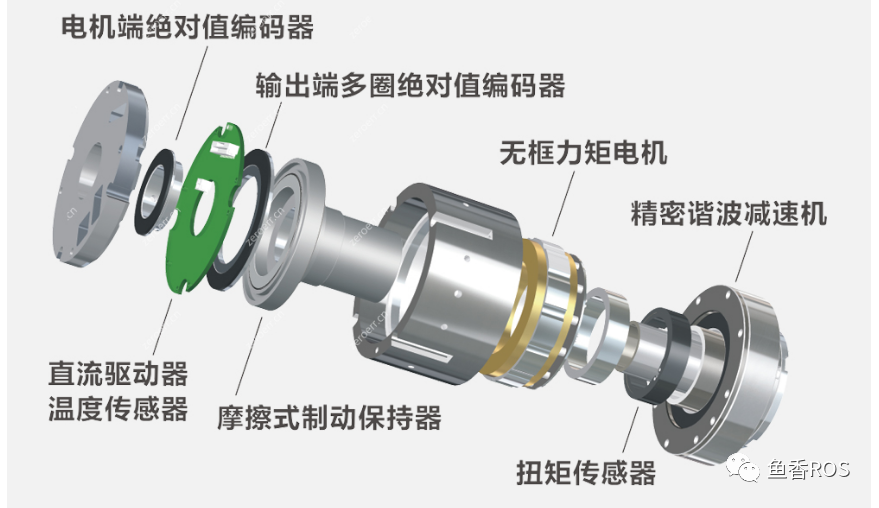
机械臂一般是由多个关节(像人手一样)组成的,每个关节里面其实就是一个个电机。如图1-1所示,这是一个常见的六轴机械臂,关节虽小,五脏俱全,图1-2是关节的组成结构。
图1-1
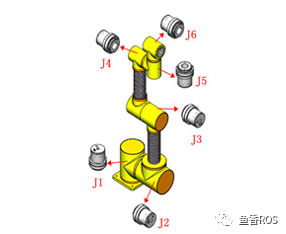
图1-2
一般机械臂的关节都会提供位置控制、力控制或速度控制接口给我们使用,拿图1-1的六轴机械臂来说,假如我们可以改变每一个关节的角度,那么就可以让机械臂的末端到达各种姿态。
但随之而来的问题就来了,如何让机械臂末端以我们想要的速度、想要的轨迹到达我们想要的位置,有问题就有解决方案,基于ROS2的机械臂运动规划、感知、运动学、控制和导航的Moveit2就被设计出来解决这一类问题。
Moveit2的前身是Moveit,Moveit2继承了Moveit的优点结合ROS2带来的新特性,实现了一个更加强大的机械臂控制框架,所以从本章开始,我将带你一起学习和使用Moveit,并带你将自己的机械臂模型适配Moveit2。