ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map
-
小鱼老师好,这个小节代码我反复检查没有问题,运行后总是报错map找不到,麻烦帮忙查看下,非常感谢。
我自己摸索的很久,通过百度和AI都没有能解决。
源码如下:import os import launch import launch_ros from ament_index_python.packages import get_package_share_directory from launch.launch_description_sources import PythonLaunchDescriptionSource def generate_launch_description(): fishbot_navigation2_dir = get_package_share_directory('fishbot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') rviz_config_dir = os.path.join(fishbot_navigation2_dir, 'rviz', 'nav2_default_view.rviz') use_sim_time = launch.substitutions.LaunchConfiguration('use_sim_time', default='true') map_yaml_path = launch.substitutions.LaunchConfiguration('map', default=os.path.join(fishbot_navigation2_dir, 'maps', 'room.yaml')) nav2_param_path = launch.substitutions.LaunchConfiguration('params_file', default=os.path.join(fishbot_navigation2_dir, 'config', 'nav2_params.yaml')) return launch.LaunchDescription([ launch.actions.DeclareLaunchArgument( 'use_sim_time', default_value=use_sim_time, description='Use simulation (Gazebo) clock if true'), launch.actions.DeclareLaunchArgument( 'map', default_value=map_yaml_path, description='Full path to map file to load'), launch.actions.DeclareLaunchArgument( 'params_file', default_value=nav2_param_path, description='Full path to param file containing the ROS parameters.'), launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource([nav2_bringup_dir, '/launch', '/bringup_launch.py']), launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ), launch_ros.actions.Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen'), ])报错如下:
[component_container_isolated-1] [INFO] [1729425072.452304242] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not existrviz2显示如下:
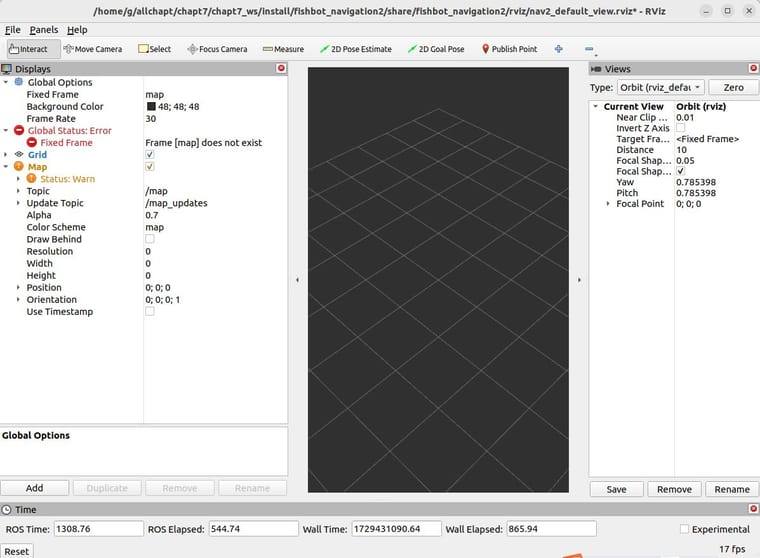
-
你遇到的错误提示表明ROS 2的TF(Transform Fusion)系统无法找到名为"map"的坐标系。这通常意味着你的地图文件(在这个例子中是
room.yaml)没有被正确加载,或者相关的坐标系设置没有在你的导航配置中正确设置。以下是一些可能的解决步骤:-
检查
room.yaml文件:- 确保
room.yaml文件存在且位于你指定的路径下(fishbot_navigation2/maps/room.yaml)。 - 打开
room.yaml文件,检查是否定义了map坐标系。通常,YAML文件中的image标签后面会跟随一个resolution、origin(包含x,y,z,yaw等信息),这些定义了地图的起始点和分辨率,但更重要的是确认frame字段是否被设置为map。
示例:
image: my_map.png resolution: 0.050000 origin: [-10.000000, -10.000000, 0.000000, 0.000000] negate: 0 occupied_thresh: 0.65 free_thresh: 0.196 # 确保这里有 frame: map - 确保
-
检查导航配置文件:
- 确保你的导航配置文件(如
nav2_params.yaml)中正确引用了地图文件,并且所有相关的坐标系(如base_link到map的变换)都已正确配置。 - 检查是否有任何节点或服务依赖于
map坐标系,并确保这些依赖关系在系统中得到了满足。
- 确保你的导航配置文件(如
-
确保TF广播:
- 检查你的系统是否有任何节点负责发布从
base_link到map的TF变换。这通常是由定位节点(如AMCL或静态地图服务器)完成的。 - 如果你使用的是静态地图,确保
static_map_server节点已经启动,并且配置了正确的map文件路径。
- 检查你的系统是否有任何节点负责发布从
-
运行tf_tree:
- 使用
ros2 run tf2_ros tf2_echo base_link map来查看base_link到map的变换是否存在。 - 如果变换不存在,尝试查看
ros2 run tf2_tools view_frames的输出,以了解系统中可用的所有坐标系。
- 使用
-
检查启动文件:
- 确保你的
bringup_launch.py文件中包含了所有必要的节点,特别是那些与地图和定位相关的节点。 - 检查是否有任何条件或参数设置可能导致某些节点未被正确启动。
- 确保你的
-
重启ROS 2环境:
- 有时候,简单地重启你的ROS 2环境可以解决一些看似复杂的问题。确保所有节点都已正确停止,然后重新运行你的启动文件。
通过上述步骤,你应该能够诊断并解决找不到
map坐标系的问题。如果问题仍然存在,请检查是否有其他相关的错误消息或日志输出,这些可能会提供更多关于问题原因的线索。
以上为生成回答,仅供参考~
-
-
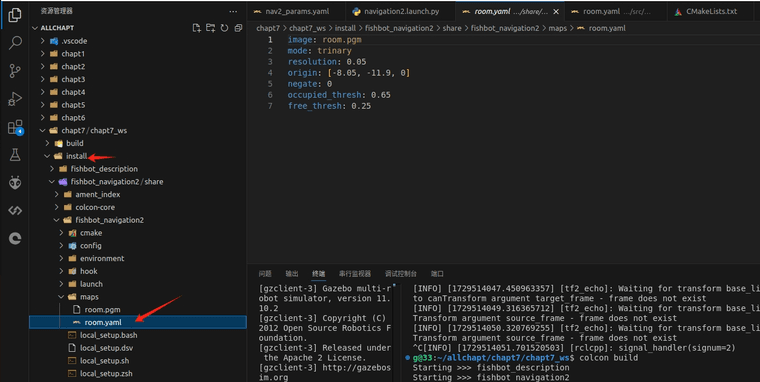
你给的信息比较少,你可以看看你的地图文件夹(maps)是否在CmakeLists.txt里面正确安装
-
@小伊 在这里面,截图如下:
我复制一个完整的运行日志:
-
由于我无法直接查看或复制您提供的截图或完整的运行日志,我将提供一些通用的步骤和建议,这些通常可以帮助您分析和解决运行日志中的问题。以下是一些基本的步骤:
1. 识别日志级别
首先,注意日志中的不同级别(如 INFO, DEBUG, WARNING, ERROR, CRITICAL)。通常,ERROR 和 CRITICAL 级别的日志指示了问题所在,而 INFO 和 DEBUG 级别的日志则提供了背景信息或详细的调试信息。
2. 查找关键字
在日志中搜索与您的应用或问题相关的关键字。这可以是错误代码、文件名、函数名或任何您认为可能与问题相关的文本。
3. 分析错误和异常
如果日志中包含错误或异常信息,请仔细阅读它们。错误消息通常会告诉您问题发生的位置(文件名和行号)以及问题的性质。
4. 检查堆栈跟踪
堆栈跟踪(Stack Trace)是错误日志中非常重要的一部分,它显示了方法调用的顺序,从发生错误的点开始回溯到程序的入口点。通过分析堆栈跟踪,您可以了解错误是如何传播的,并找到可能的原因。
5. 验证外部依赖和配置
检查日志中是否提到了与外部服务、数据库或配置文件的交互问题。确保所有外部依赖都是可访问的,并且配置是正确的。
6. 复查代码
如果日志指出了代码中的特定行或函数,请复查这些代码。检查是否有逻辑错误、类型错误、未处理的异常或资源泄漏等。
7. 搜索类似问题
如果问题仍然不清楚,尝试在互联网上搜索类似的错误消息或问题。可能有人已经遇到了相同的问题,并分享了解决方案。
8. 使用调试工具
如果可能的话,使用调试工具来逐步执行代码并观察变量的状态。这可以帮助您更深入地了解问题发生的上下文。
9. 咨询同事或社区
如果您自己无法解决问题,不妨咨询同事或在相关的开发者社区中寻求帮助。
示例日志分析
假设您有一个错误日志条目如下:
ERROR: 2023-04-01 12:34:56,123 - myapp.module - An error occurred while processing request: TypeError: unsupported operand type(s) for +: 'str' and 'int' Traceback (most recent call last): File "/path/to/myapp/module.py", line 123, in process_request result = some_function(a, b) File "/path/to/myapp/utils.py", line 456, in some_function return a + b在这个例子中,错误是由于尝试将字符串和整数相加导致的。您应该检查
some_function的调用,并确保传递给它的参数类型是正确的。如果您能提供具体的日志内容或问题描述,我可以给出更具体的建议。
以上为生成回答,仅供参考~
-
@onedream g@33:~/allchapt/chapt7/chapt7_ws$ ros2 launch fishbot_navigation2 navigation2.launch.py
[INFO] [launch]: All log files can be found below /home/g/.ros/log/2024-10-21-20-54-55-858439-33-6373
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [component_container_isolated-1]: process started with pid [6430]
[INFO] [rviz2-2]: process started with pid [6432]
[rviz2-2] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in ""
[component_container_isolated-1] [INFO] [1729515304.247166031] [nav2_container]: Load Library: /opt/ros/humble/lib/libmap_server_core.so
[component_container_isolated-1] [INFO] [1729515304.344194835] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::CostmapFilterInfoServer>
[component_container_isolated-1] [INFO] [1729515304.344307336] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapSaver>
[component_container_isolated-1] [INFO] [1729515304.344332020] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapServer>
[component_container_isolated-1] [INFO] [1729515304.344353269] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapServer>
[component_container_isolated-1] [INFO] [1729515304.472249691] [map_server]:
[component_container_isolated-1] map_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/map_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515304.476483128] [map_server]: Creating
[component_container_isolated-1] [INFO] [1729515304.483527363] [nav2_container]: Load Library: /opt/ros/humble/lib/libcontroller_server_core.so
[component_container_isolated-1] [INFO] [1729515304.515386025] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_controller::ControllerServer>
[component_container_isolated-1] [INFO] [1729515304.515511135] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_controller::ControllerServer>
[component_container_isolated-1] [INFO] [1729515304.594817323] [controller_server]:
[component_container_isolated-1] controller_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515304.630948294] [controller_server]: Creating controller server
[component_container_isolated-1] [INFO] [1729515304.696921124] [local_costmap.local_costmap]:
[component_container_isolated-1] local_costmap lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515304.706006198] [local_costmap.local_costmap]: Creating Costmap
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/controller_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515304.711616692] [nav2_container]: Load Library: /opt/ros/humble/lib/libamcl_core.so
[component_container_isolated-1] [INFO] [1729515304.739190402] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_amcl::AmclNode>
[component_container_isolated-1] [INFO] [1729515304.739279999] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_amcl::AmclNode>
[component_container_isolated-1] [INFO] [1729515304.823247496] [amcl]:
[component_container_isolated-1] amcl lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515304.842891165] [amcl]: Creating
[component_container_isolated-1] [INFO] [1729515304.873670947] [nav2_container]: Load Library: /opt/ros/humble/lib/libsmoother_server_core.so
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/amcl' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515304.915648877] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_smoother::SmootherServer>
[component_container_isolated-1] [INFO] [1729515304.915756509] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_smoother::SmootherServer>
[component_container_isolated-1] [INFO] [1729515305.016590463] [smoother_server]:
[component_container_isolated-1] smoother_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515305.023404001] [smoother_server]: Creating smoother server
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/smoother_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515305.034661478] [nav2_container]: Load Library: /opt/ros/humble/lib/libnav2_lifecycle_manager_core.so
[component_container_isolated-1] [INFO] [1729515305.064652840] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1729515305.064775765] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1729515305.165111511] [lifecycle_manager_localization]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/lifecycle_manager_localization' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515305.236556146] [lifecycle_manager_localization]: Creating and initializing lifecycle service clients
[component_container_isolated-1] [INFO] [1729515305.245455659] [nav2_container]: Load Library: /opt/ros/humble/lib/libplanner_server_core.so
[component_container_isolated-1] [INFO] [1729515305.311314877] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_planner::PlannerServer>
[component_container_isolated-1] [INFO] [1729515305.311387075] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_planner::PlannerServer>
[component_container_isolated-1] [INFO] [1729515305.355907346] [lifecycle_manager_localization]: Starting managed nodes bringup...
[component_container_isolated-1] [INFO] [1729515305.357464147] [lifecycle_manager_localization]: Configuring map_server
[component_container_isolated-1] [INFO] [1729515305.365624617] [map_server]: Configuring
[component_container_isolated-1] [INFO] [map_io]: Loading yaml file: /home/g/allchapt/chapt7/chapt7_ws/install/fishbot_navigation2/share/fishbot_navigation2/maps/room.yaml
[component_container_isolated-1] [DEBUG] [map_io]: resolution: 0.05
[component_container_isolated-1] [DEBUG] [map_io]: origin[0]: -8.05
[component_container_isolated-1] [DEBUG] [map_io]: origin[1]: -11.9
[component_container_isolated-1] [DEBUG] [map_io]: origin[2]: 0
[component_container_isolated-1] [DEBUG] [map_io]: free_thresh: 0.25
[component_container_isolated-1] [DEBUG] [map_io]: occupied_thresh: 0.65
[component_container_isolated-1] [DEBUG] [map_io]: mode: trinary
[component_container_isolated-1] [DEBUG] [map_io]: negate: 0
[component_container_isolated-1] [INFO] [map_io]: Loading image_file: /home/g/allchapt/chapt7/chapt7_ws/install/fishbot_navigation2/share/fishbot_navigation2/maps/room.pgm
[component_container_isolated-1] [INFO] [1729515305.448887047] [planner_server]:
[component_container_isolated-1] planner_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515305.455624679] [planner_server]: Creating
[component_container_isolated-1] [INFO] [1729515305.641460336] [global_costmap.global_costmap]:
[component_container_isolated-1] global_costmap lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515305.659849835] [global_costmap.global_costmap]: Creating Costmap
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/planner_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515305.699769345] [nav2_container]: Load Library: /opt/ros/humble/lib/libbehavior_server_core.so
[component_container_isolated-1] [DEBUG] [map_io]: Read map /home/g/allchapt/chapt7/chapt7_ws/install/fishbot_navigation2/share/fishbot_navigation2/maps/room.pgm: 486 X 483 map @ 0.05 m/cell
[component_container_isolated-1] [INFO] [1729515305.792563937] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<behavior_server::BehaviorServer>
[component_container_isolated-1] [INFO] [1729515305.793759685] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<behavior_server::BehaviorServer>
[component_container_isolated-1] [INFO] [1729515305.847009423] [lifecycle_manager_localization]: Configuring amcl
[component_container_isolated-1] [INFO] [1729515305.847413455] [amcl]: Configuring
[component_container_isolated-1] [INFO] [1729515305.847880376] [amcl]: initTransforms
[component_container_isolated-1] [INFO] [1729515306.101881129] [amcl]: initPubSub
[component_container_isolated-1] [INFO] [1729515306.149700148] [behavior_server]:
[component_container_isolated-1] behavior_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515306.168922825] [amcl]: Subscribed to map topic.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/behavior_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515306.212135797] [nav2_container]: Load Library: /opt/ros/humble/lib/libbt_navigator_core.so
[component_container_isolated-1] [INFO] [1729515306.257379049] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_bt_navigator::BtNavigator>
[component_container_isolated-1] [INFO] [1729515306.257465077] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_bt_navigator::BtNavigator>
[component_container_isolated-1] [INFO] [1729515306.279662336] [lifecycle_manager_localization]: Activating map_server
[component_container_isolated-1] [INFO] [1729515306.282865159] [map_server]: Activating
[component_container_isolated-1] [INFO] [1729515306.305072338] [map_server]: Creating bond (map_server) to lifecycle manager.
[component_container_isolated-1] [INFO] [1729515306.314930954] [amcl]: Received a 486 X 483 map @ 0.050 m/pix
[component_container_isolated-1] [INFO] [1729515306.488396167] [lifecycle_manager_localization]: Server map_server connected with bond.
[component_container_isolated-1] [INFO] [1729515306.494473972] [lifecycle_manager_localization]: Activating amcl
[component_container_isolated-1] [INFO] [1729515306.535732605] [bt_navigator]:
[component_container_isolated-1] bt_navigator lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/bt_navigator' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515306.535897192] [bt_navigator]: Creating
[component_container_isolated-1] [INFO] [1729515306.556627732] [nav2_container]: Load Library: /opt/ros/humble/lib/libwaypoint_follower_core.so
[component_container_isolated-1] [INFO] [1729515306.569814659] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_waypoint_follower::WaypointFollower>
[component_container_isolated-1] [INFO] [1729515306.569920266] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_waypoint_follower::WaypointFollower>
[component_container_isolated-1] [INFO] [1729515306.577709037] [amcl]: Activating
[component_container_isolated-1] [INFO] [1729515306.577818035] [amcl]: Creating bond (amcl) to lifecycle manager.
[rviz2-2] [INFO] [1729515306.630541823] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-2] [INFO] [1729515306.630957262] [rviz2]: OpenGl version: 4.5 (GLSL 4.5)
[component_container_isolated-1] [INFO] [1729515306.712862941] [lifecycle_manager_localization]: Server amcl connected with bond.
[component_container_isolated-1] [INFO] [1729515306.714234347] [lifecycle_manager_localization]: Managed nodes are active
[component_container_isolated-1] [INFO] [1729515306.714283158] [lifecycle_manager_localization]: Creating bond timer...
[component_container_isolated-1] [INFO] [1729515306.717833430] [waypoint_follower]:
[component_container_isolated-1] waypoint_follower lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1729515306.726260649] [waypoint_follower]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/waypoint_follower' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515306.766789038] [nav2_container]: Load Library: /opt/ros/humble/lib/libvelocity_smoother_core.so
[component_container_isolated-1] [INFO] [1729515306.803518289] [amcl]: createLaserObject
[component_container_isolated-1] [INFO] [1729515306.806182040] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_velocity_smoother::VelocitySmoother>
[component_container_isolated-1] [INFO] [1729515306.806471898] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_velocity_smoother::VelocitySmoother>
[component_container_isolated-1] [INFO] [1729515306.906702789] [velocity_smoother]:
[component_container_isolated-1] velocity_smoother lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/velocity_smoother' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515306.917426614] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1729515306.917492611] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1729515307.049421638] [lifecycle_manager_navigation]: Creating
[component_container_isolated-1] [INFO] [1729515307.073852060] [lifecycle_manager_navigation]: Creating and initializing lifecycle service clients
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/lifecycle_manager_navigation' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1729515307.201579716] [lifecycle_manager_navigation]: Starting managed nodes bringup...
[component_container_isolated-1] [INFO] [1729515307.202262053] [lifecycle_manager_navigation]: Configuring controller_server
[component_container_isolated-1] [INFO] [1729515307.203951959] [controller_server]: Configuring controller interface
[component_container_isolated-1] [INFO] [1729515307.205456469] [controller_server]: getting goal checker plugins..
[component_container_isolated-1] [INFO] [1729515307.207992641] [controller_server]: Controller frequency set to 20.0000Hz
[component_container_isolated-1] [INFO] [1729515307.208158657] [local_costmap.local_costmap]: Configuring
[component_container_isolated-1] [INFO] [1729515307.268556881] [local_costmap.local_costmap]: Using plugin "voxel_layer"
[component_container_isolated-1] [INFO] [1729515307.346121195] [local_costmap.local_costmap]: Subscribed to Topics: scan
[component_container_isolated-1] [INFO] [1729515307.428420122] [local_costmap.local_costmap]: Initialized plugin "voxel_layer"
[component_container_isolated-1] [INFO] [1729515307.428488808] [local_costmap.local_costmap]: Using plugin "inflation_layer"
[component_container_isolated-1] [INFO] [1729515307.454789939] [local_costmap.local_costmap]: Initialized plugin "inflation_layer"
[rviz2-2] [INFO] [1729515307.475796730] [rviz2]: Stereo is NOT SUPPORTED
[component_container_isolated-1] [INFO] [1729515307.548083089] [controller_server]: Created progress_checker : progress_checker of type nav2_controller::SimpleProgressChecker
[component_container_isolated-1] [INFO] [1729515307.561959789] [controller_server]: Created goal checker : general_goal_checker of type nav2_controller::SimpleGoalChecker
[component_container_isolated-1] [INFO] [1729515307.569346586] [controller_server]: Controller Server has general_goal_checker goal checkers available.
[component_container_isolated-1] [INFO] [1729515307.601077523] [controller_server]: Created controller : FollowPath of type dwb_core::DWBLocalPlanner
[component_container_isolated-1] [INFO] [1729515307.625517768] [controller_server]: Setting transform_tolerance to 0.200000
[component_container_isolated-1] [INFO] [1729515308.361263930] [controller_server]: Using critic "RotateToGoal" (dwb_critics::RotateToGoalCritic)
[component_container_isolated-1] [INFO] [1729515308.363622502] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1729515308.364103929] [controller_server]: Using critic "Oscillation" (dwb_critics::OscillationCritic)
[component_container_isolated-1] [INFO] [1729515308.375812555] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1729515308.379610072] [controller_server]: Using critic "BaseObstacle" (dwb_critics::BaseObstacleCritic)
[component_container_isolated-1] [INFO] [1729515308.384240240] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1729515308.384970120] [controller_server]: Using critic "GoalAlign" (dwb_critics::GoalAlignCritic)
[component_container_isolated-1] [INFO] [1729515308.390574126] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1729515308.391223192] [controller_server]: Using critic "PathAlign" (dwb_critics::PathAlignCritic)
[component_container_isolated-1] [INFO] [1729515308.398216385] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1729515308.399177733] [controller_server]: Using critic "PathDist" (dwb_critics::PathDistCritic)
[component_container_isolated-1] [INFO] [1729515308.404467980] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1729515308.405977286] [controller_server]: Using critic "GoalDist" (dwb_critics::GoalDistCritic)
[component_container_isolated-1] [INFO] [1729515308.411205192] [controller_server]: Critic plugin initialized
[component_container_isolated-1] [INFO] [1729515308.411293876] [controller_server]: Controller Server has FollowPath controllers available.
[component_container_isolated-1] [INFO] [1729515308.477765730] [lifecycle_manager_navigation]: Configuring smoother_server
[component_container_isolated-1] [INFO] [1729515308.483735871] [smoother_server]: Configuring smoother server
[component_container_isolated-1] [INFO] [1729515308.613171298] [smoother_server]: Created smoother : simple_smoother of type nav2_smoother::SimpleSmoother
[component_container_isolated-1] [INFO] [1729515308.627832487] [smoother_server]: Smoother Server has simple_smoother smoothers available.
[component_container_isolated-1] [INFO] [1729515308.697081498] [lifecycle_manager_navigation]: Configuring planner_server
[component_container_isolated-1] [INFO] [1729515308.697560217] [planner_server]: Configuring
[component_container_isolated-1] [INFO] [1729515308.697794137] [global_costmap.global_costmap]: Configuring
[component_container_isolated-1] [WARN] [1729515308.754484508] [amcl]: AMCL cannot publish a pose or update the transform. Please set the initial pose...
[component_container_isolated-1] [INFO] [1729515308.780654263] [global_costmap.global_costmap]: Using plugin "static_layer"
[component_container_isolated-1] [INFO] [1729515308.829287881] [global_costmap.global_costmap]: Subscribing to the map topic (/map) with transient local durability
[component_container_isolated-1] [INFO] [1729515308.835517569] [global_costmap.global_costmap]: Initialized plugin "static_layer"
[component_container_isolated-1] [INFO] [1729515308.835658779] [global_costmap.global_costmap]: Using plugin "obstacle_layer"
[component_container_isolated-1] [INFO] [1729515308.865737711] [global_costmap.global_costmap]: Subscribed to Topics: scan
[component_container_isolated-1] [INFO] [1729515308.929484512] [global_costmap.global_costmap]: Initialized plugin "obstacle_layer"
[component_container_isolated-1] [INFO] [1729515308.931013210] [global_costmap.global_costmap]: Using plugin "inflation_layer"
[component_container_isolated-1] [INFO] [1729515308.956233783] [global_costmap.global_costmap]: Initialized plugin "inflation_layer"
[component_container_isolated-1] [INFO] [1729515309.035724948] [global_costmap.global_costmap]: StaticLayer: Resizing costmap to 486 X 483 at 0.050000 m/pix
[component_container_isolated-1] [INFO] [1729515309.046563384] [planner_server]: Created global planner plugin GridBased of type nav2_navfn_planner/NavfnPlanner
[component_container_isolated-1] [INFO] [1729515309.046649004] [planner_server]: Configuring plugin GridBased of type NavfnPlanner
[component_container_isolated-1] [INFO] [1729515309.069704574] [planner_server]: Planner Server has GridBased planners available.
[component_container_isolated-1] [INFO] [1729515309.139093375] [lifecycle_manager_navigation]: Configuring behavior_server
[component_container_isolated-1] [INFO] [1729515309.139555393] [behavior_server]: Configuring
[component_container_isolated-1] [INFO] [1729515309.203199068] [behavior_server]: Creating behavior plugin spin of type nav2_behaviors/Spin
[component_container_isolated-1] [INFO] [1729515309.219505899] [behavior_server]: Configuring spin
[component_container_isolated-1] [INFO] [1729515309.274658770] [behavior_server]: Creating behavior plugin backup of type nav2_behaviors/BackUp
[component_container_isolated-1] [INFO] [1729515309.287041422] [behavior_server]: Configuring backup
[component_container_isolated-1] [INFO] [1729515309.331797104] [behavior_server]: Creating behavior plugin drive_on_heading of type nav2_behaviors/DriveOnHeading
[component_container_isolated-1] [INFO] [1729515309.346747901] [behavior_server]: Configuring drive_on_heading
[component_container_isolated-1] [INFO] [1729515309.386738259] [behavior_server]: Creating behavior plugin assisted_teleop of type nav2_behaviors/AssistedTeleop
[component_container_isolated-1] [INFO] [1729515309.415520159] [behavior_server]: Configuring assisted_teleop
[component_container_isolated-1] [INFO] [1729515309.494083407] [behavior_server]: Creating behavior plugin wait of type nav2_behaviors/Wait
[component_container_isolated-1] [INFO] [1729515309.503775695] [behavior_server]: Configuring wait
[component_container_isolated-1] [INFO] [1729515309.554583966] [lifecycle_manager_navigation]: Configuring bt_navigator
[component_container_isolated-1] [INFO] [1729515309.558879006] [bt_navigator]: Configuring
[component_container_isolated-1] [INFO] [1729515310.919644473] [lifecycle_manager_navigation]: Configuring waypoint_follower
[component_container_isolated-1] [INFO] [1729515310.920338635] [waypoint_follower]: Configuring
[component_container_isolated-1] [INFO] [1729515311.036646226] [waypoint_follower]: Created waypoint_task_executor : wait_at_waypoint of type nav2_waypoint_follower::WaitAtWaypoint
[component_container_isolated-1] [INFO] [1729515311.054167228] [lifecycle_manager_navigation]: Configuring velocity_smoother
[component_container_isolated-1] [INFO] [1729515311.058475390] [velocity_smoother]: Configuring velocity smoother
[component_container_isolated-1] [INFO] [1729515311.134757505] [lifecycle_manager_navigation]: Activating controller_server
[component_container_isolated-1] [INFO] [1729515311.139850015] [controller_server]: Activating
[component_container_isolated-1] [INFO] [1729515311.140242866] [local_costmap.local_costmap]: Activating
[component_container_isolated-1] [INFO] [1729515311.140304633] [local_costmap.local_costmap]: Checking transform
[component_container_isolated-1] [INFO] [1729515311.140898916] [local_costmap.local_costmap]: start
[component_container_isolated-1] [INFO] [1729515311.354125304] [controller_server]: Creating bond (controller_server) to lifecycle manager.
[component_container_isolated-1] [WARN] [1729515311.433573107] [amcl]: AMCL cannot publish a pose or update the transform. Please set the initial pose...
[component_container_isolated-1] [INFO] [1729515311.474505395] [lifecycle_manager_navigation]: Server controller_server connected with bond.
[component_container_isolated-1] [INFO] [1729515311.474597172] [lifecycle_manager_navigation]: Activating smoother_server
[component_container_isolated-1] [INFO] [1729515311.475111093] [smoother_server]: Activating
[component_container_isolated-1] [INFO] [1729515311.475181299] [smoother_server]: Creating bond (smoother_server) to lifecycle manager.
[component_container_isolated-1] [INFO] [1729515311.621530723] [lifecycle_manager_navigation]: Server smoother_server connected with bond.
[component_container_isolated-1] [INFO] [1729515311.621664104] [lifecycle_manager_navigation]: Activating planner_server
[component_container_isolated-1] [INFO] [1729515311.622193056] [planner_server]: Activating
[component_container_isolated-1] [INFO] [1729515311.622359270] [global_costmap.global_costmap]: Activating
[component_container_isolated-1] [INFO] [1729515311.622410177] [global_costmap.global_costmap]: Checking transform
[component_container_isolated-1] [INFO] [1729515311.622448265] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist刚刚还没有暂停就发出来了。从运行到报最后一个关键错误。今天第3天了,还没有自研解决。
-
@onedream 你单独发个地图看看
-
@onedream 好的,地图如下:
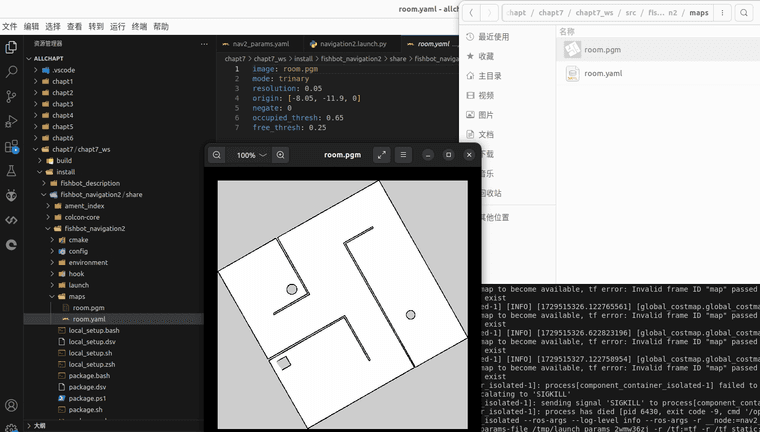
我昨天尝试单独在rviz2中打开该地图也没有成功,前面的章节包括7.3.3前面的小节都是顺利通过的。
-
@onedream 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
Activating
我的意思是你单独启动地图服务节点发出地图来看看,不要启动整个导航包。刚才看了下你发的日志,你没有给机器人设置初始姿态吗,就是在rviz2上点那个intial_pose
-
@2438413171 2D Pose Estimate
-
@onedream 是的,就是rviz2中没有地图所以我没法点2D Pose Estimate;
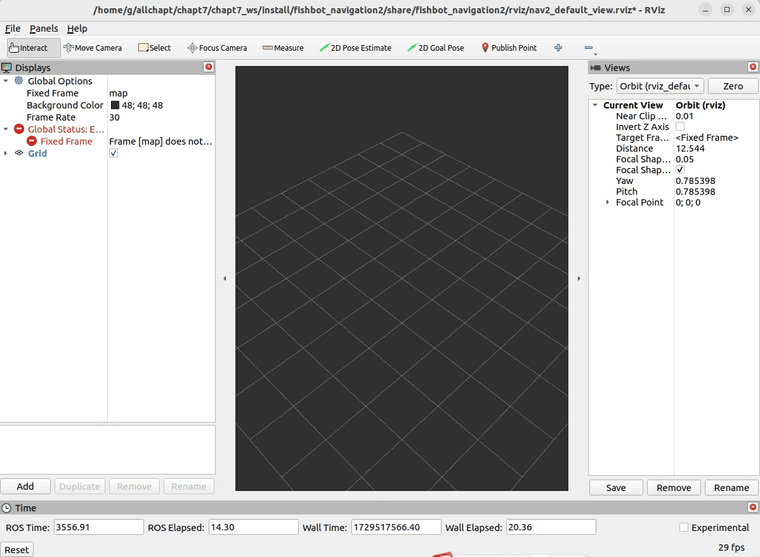
然后我在昨天尝试加入topic--map也是报错
单独启动地图节点我昨天也想到了,但是找了半天不知道是哪个命令了
-
@2438413171 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
@onedream 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
Activating
我的意思是你单独启动地图服务节点发出地图来看看,不要启动整个导航包。刚才看了下你发的日志,你没有给机器人设置初始姿态吗,就是在rviz2上点那个intial_pose
没有地图也点几下那个按钮,有时候是因为没有初始姿态这个原因的,你也可以试试在配置文件中事先随便给一个初始姿态,我还遇到过rviz2必须先提前打开订阅地图话题再运行程序才可以看到地图,多试试把。提前给定初始姿态你可以在配置文件amcl下面加入这段话:
set_initial_pose: true
always_reset_initial_pose: false
initial_pose:
x: 0.0189337
y: 0.00899811
z: 0.0
yaw: 0.011236 -
@onedream 单独启动地图你可以网上找个教程看看,很多的,一步一步排除问题
-
@2438413171 好的,感谢大佬,感谢指导,我先按照你的方法去做。那个单独启动的暂不管他,不行了我在去找。
-
@onedream 在 ROS2书籍7.3.3章节运行navigation.launch.py后报错找不到map 中说:
rviz_config_dir
应该是没有初始化位姿态导致的,另外就是先启动Gazebo仿真程序才行,不知道你启动了没。
不急就再等等,这周就讲到第七章了
-
@小鱼 要的,小鱼老师,谢谢了,最终确定就是没有初始化。我不和二极管说话大佬指导的是对的没有地图也可以去初始化。感谢感谢。
-
@onedream 解决了你不告诉我,让我开心开心哈哈哈哈
-
@2438413171 深感抱歉,下次一定第一时间告诉你,感谢感谢。