【求助】Moveit和Gazebo进行UR机械臂联合仿真报错
-
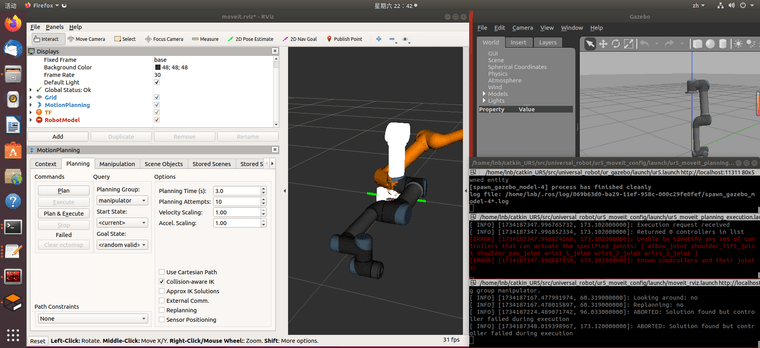
我在复现github上UR项目(项目地址https://github.com/ros-industrial/universal_robot),通过Moveit和Gazebo进行联合仿真,遇到了下面的报错。有小伙伴知道如何解决,能分享一下解决方法吗
[ERROR] [1734187347.996874268, 173.102000000]: Unable to identify any set of controllers that can actuate the specified joints: [ elbow_joint shoulder_lift_joint shoulder_pan_joint wrist_1_joint wrist_2_joint wrist_3_joint ]
[ERROR] [1734187347.996887859, 173.102000000]: Known controllers and their joints:
-
这个错误通常表明MoveIt无法找到能够控制指定关节的控制器。从错误信息来看,MoveIt试图控制UR机械臂的以下关节:
elbow_joint,shoulder_lift_joint,shoulder_pan_joint,wrist_1_joint,wrist_2_joint,wrist_3_joint,但是未能找到与之匹配的控制器。以下是一些可能的解决步骤:
-
检查控制器配置:
确保你的controller_manager已经正确配置,并且包含了这些关节的控制器。通常,这些配置在ros_controllers包中的YAML文件中定义。例如,你可能有一个文件如ur_robot.yaml,其中定义了各个关节的控制器(如位置控制器、速度控制器等)。 -
确保控制器启动:
在启动MoveIt和Gazebo之前,确保你已经启动了控制器。这通常是通过roslaunch命令来启动一个包含controller_manager和具体控制器定义的launch文件。 -
检查机器人描述文件:
确保URDF(统一机器人描述格式)文件中正确定义了这些关节。关节名称必须与控制器配置中的名称完全匹配。 -
查看ROS日志:
使用rostopic echo /joint_states来查看当前哪些关节被识别并报告状态。这可以帮助确认关节名称是否正确,以及它们是否正在被正确发布。 -
检查时间戳和同步问题:
错误日志中的时间戳(1734187347.996874268, 173.102000000)看起来有些异常,尤其是第一部分的时间戳(1734187347.996874268),这通常不应该是一个如此大的数字,除非你的系统时间设置有问题。确保你的系统时间是正确的,并且所有ROS节点都在同步的时间框架内运行。 -
依赖和版本问题:
确保你使用的ROS版本、MoveIt版本、Gazebo版本以及ros-industrial/universal_robot仓库的版本都是兼容的。有时候,库和框架的更新会引入不兼容的更改。 -
查看GitHub Issues和社区:
访问ros-industrial/universal_robot的GitHub页面,查看是否有其他人报告了类似的问题,或者是否有已知的兼容性问题。
如果以上步骤都不能解决问题,你可能需要更详细地检查你的配置文件和代码,或者考虑在ROS社区或相关的论坛中寻求帮助。
以上为生成回答,仅供参考~
-