二驱版fishbot,imu无法连接
-
在调用开源库驱动章节,使用原代码运行时,没有输出,更改代码setup部分后,
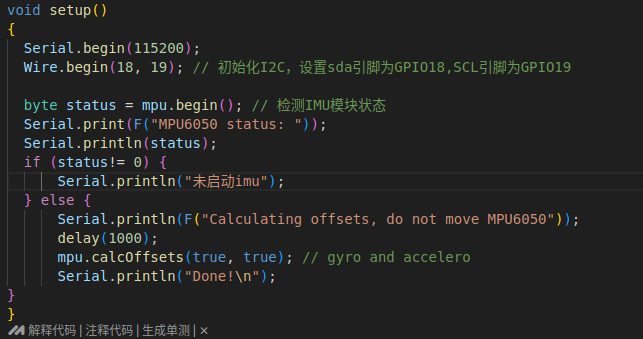 输出结果如下图
输出结果如下图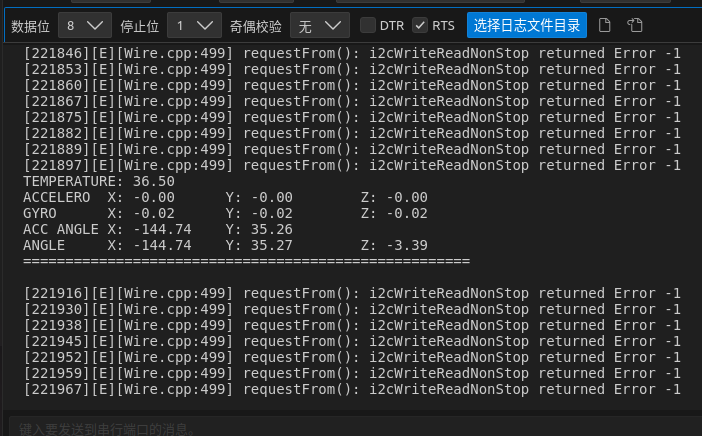 请问有人遇到过这个问题吗
请问有人遇到过这个问题吗 -
针对您提到的“二驱版fishbot,IMU无法连接”的问题,以及您在调用开源库驱动章节遇到的输出问题,这里有几个可能的解决步骤和检查点,希望能帮助您解决问题:
-
检查IMU硬件连接:
- 确保IMU(惯性测量单元)正确连接到您的fishbot主板上。
- 检查连接线是否完好,没有松动或损坏。
- 如果可能,尝试用其他IMU或连接线替换,看是否是硬件问题。
-
检查驱动和库:
- 确保您使用的开源库与您的IMU型号兼容。
- 查看开源库的文档,确认所有依赖都已正确安装。
- 检查是否有更新的库版本,有时候新版本会修复旧版本的bug。
-
检查代码:
- 您提到更改了
setup部分的代码,这可能影响了IMU的初始化或数据读取。 - 回顾您的更改,确保没有破坏IMU的初始化流程。
- 检查是否有任何错误或警告信息被输出到控制台或日志文件,这可能会给出更多线索。
- 您提到更改了
-
调试和日志:
- 增加日志输出,特别是在与IMU交互的关键部分。
- 使用调试器逐步执行代码,查看在哪一步骤IMU连接失败。
- 检查IMU的通信协议(如I2C, SPI, UART等)是否被正确配置。
-
查看输出信息:
- 您提到更改代码后有输出,但不清楚具体输出内容。分析这些输出,看是否有与IMU相关的错误信息。
- 如果输出是乱码或非预期信息,可能是通信参数(如波特率、地址等)设置错误。
-
社区和文档:
- 搜索开源项目的issue跟踪器,看看是否有其他人遇到类似问题。
- 查阅fishbot或IMU的官方文档和论坛,可能有针对特定问题的解决方案。
-
硬件兼容性:
- 确认您的fishbot主板支持您使用的IMU型号。
- 有时候,硬件之间的兼容性问题可能导致连接失败。
如果以上步骤仍然无法解决问题,您可能需要更详细地描述您的硬件配置、使用的开源库、具体的代码更改以及完整的输出信息,以便获得更具体的帮助。希望这些建议对您有所帮助!
以上为生成回答,仅供参考~
-
-
@wxb111 你需要提供开发板硬件版本,使用的开源库版本,以及所看教程的信息。后期硬件版本和早期的教程不匹配,需要更新一些开源库地址。
-
@小鱼 好的多谢小鱼,开发版硬件应该是1.7.0?(不知道是不是指这个,12月12号发货的),教程和开源库我是完全跟着网页版《动手学ros2》来的
-
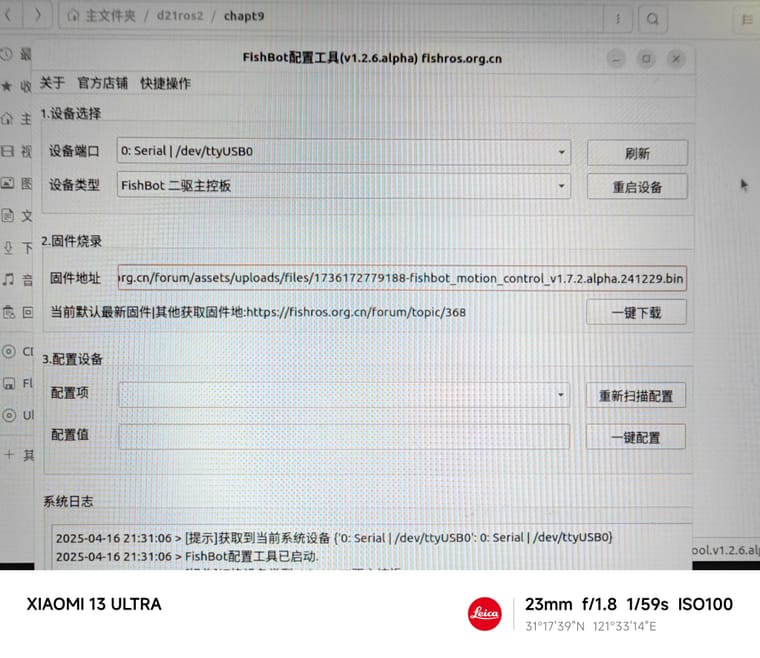
@wxb111 把IMU驱动地址改成下面这个
-
@小鱼 神医啊,谢谢大佬,解决了
-
此回复已被删除! -
@小鱼 我用的就是这个新的,但是一直卡在
void setup() {
Serial.begin(115200); // 初始化串口通信,波特率为115200
Wire.begin(18,19); // 初始化I2C总线,设置SDA引脚为18,SCL 引脚为19 // #byte status = mpu.begin(); // 启动MPU6050传感器,并获取状态
Serial.print(F("MPU6050 status: "));
Serial.println(status);
while(status!=0){ Serial.print(F("error "));} // stop everything if could not connect to MPU6050
这个地方死循环 -
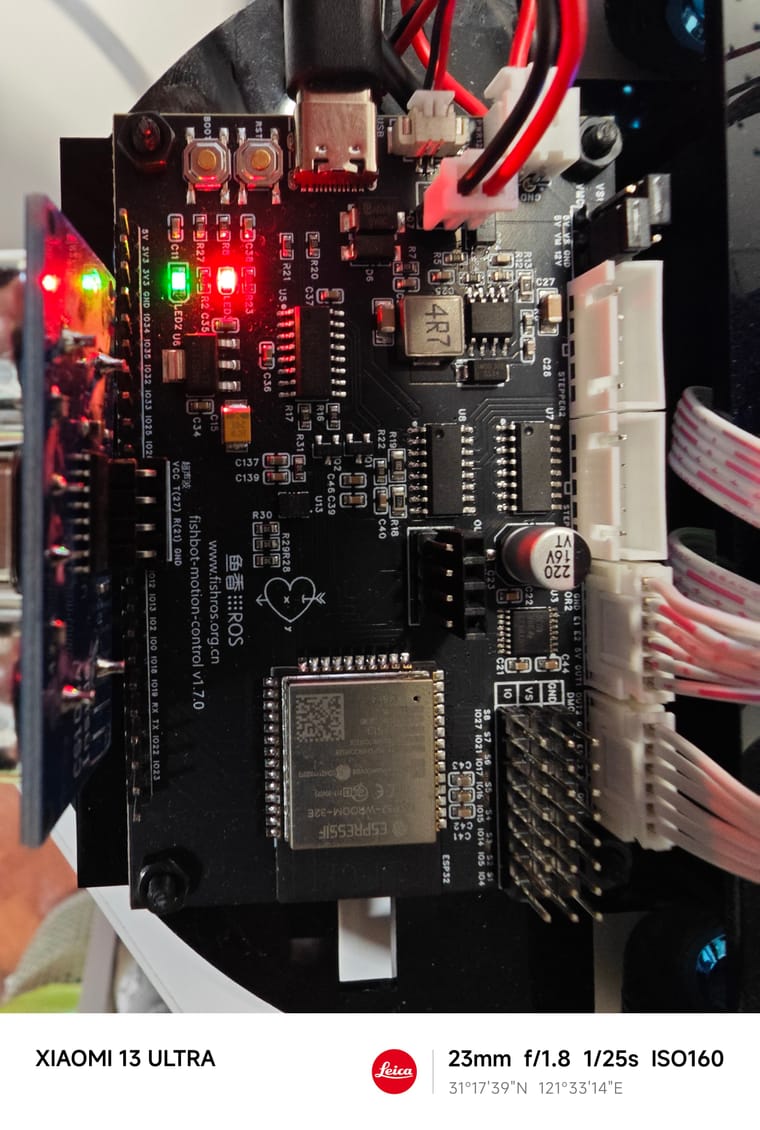
@330190572 开发板版本是多少的,拍个照片看看
-
-
@330190572 确认下驱动版本,不行下编译好的固件,连上microros 看看imu话题有没有数据
-
@小鱼
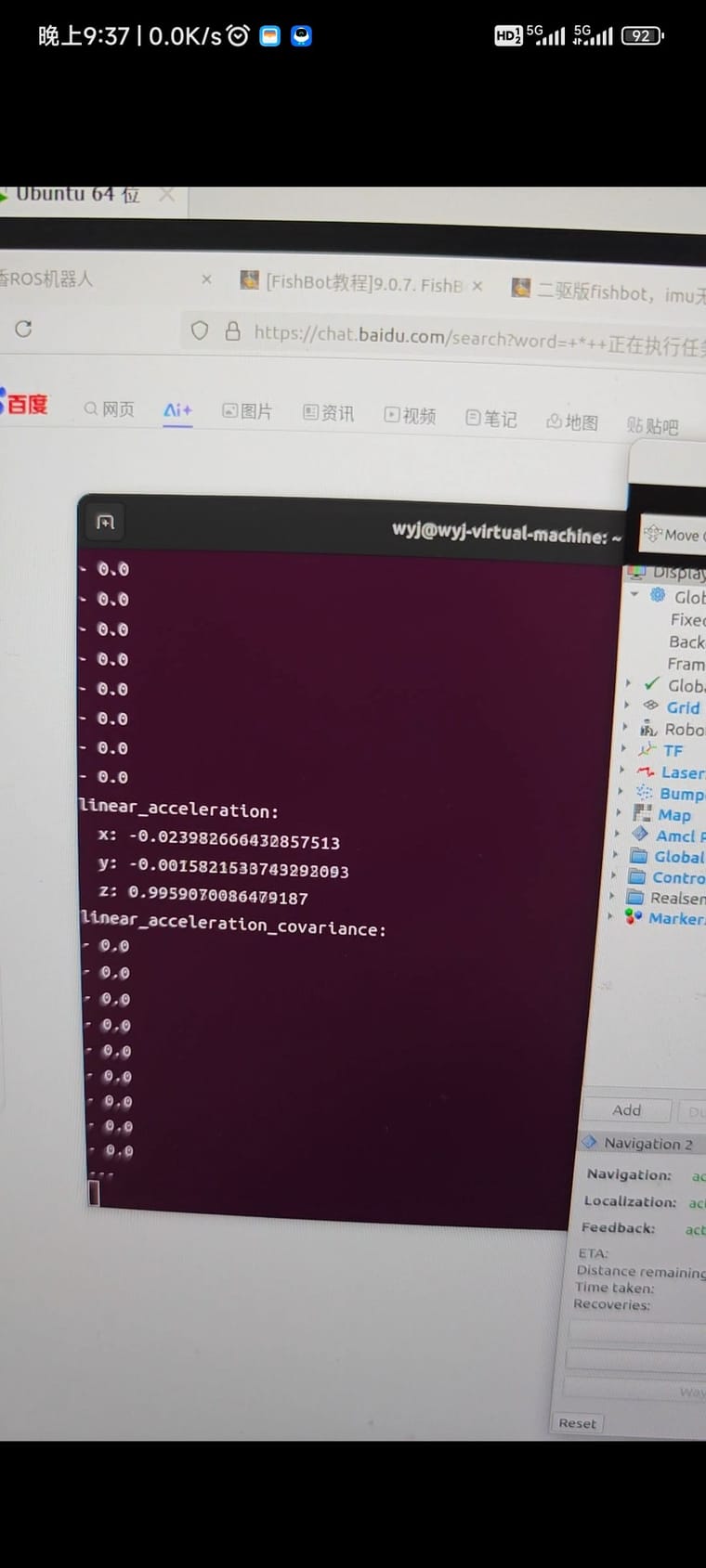 有数据,小车在移动的时候,x,y,z在变化
有数据,小车在移动的时候,x,y,z在变化 -
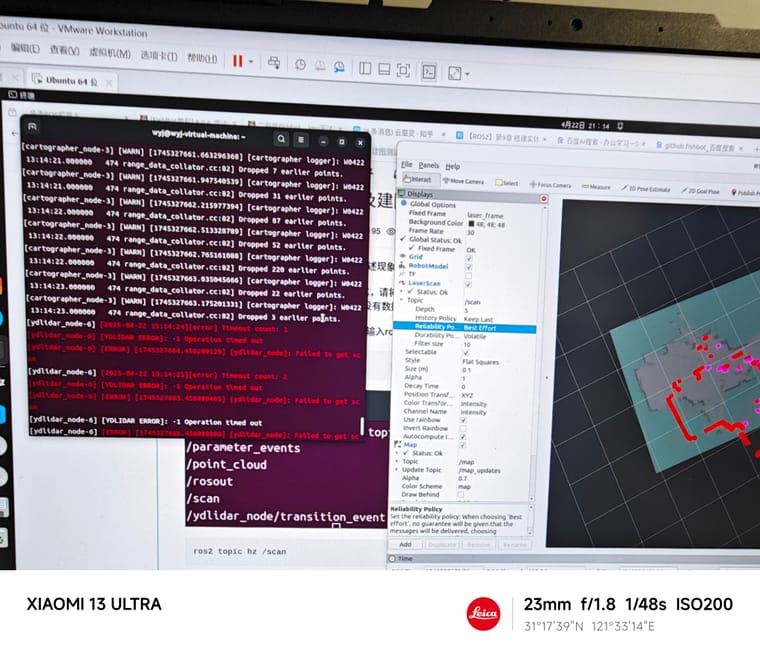
@小鱼 另外,建图的时候,为什么图会乱转
-
@小鱼 但是imu数据变化很小(小车在移动过程中),这对吗
-
@330190572 加速度不大情况下应该正常
-
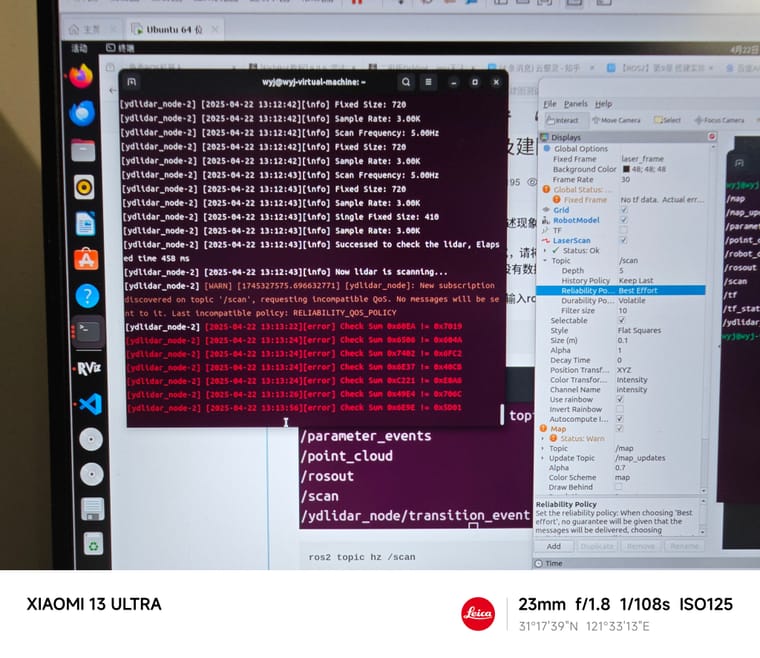
@小鱼 那在图中显示的,执行雷达驱动扫描的时候报的错,check sum,,,,,等等,是啥意思,有什么问题吗
-
@330190572 只要不是一直刷这个错误就没事