制作一个基于ros的自动导航机器人
-
使用店铺买的FishBot基础款,进行制作,需要添加一个树莓派完成一个自动导航功能
-
制作一个基于ROS(Robot Operating System)的自动导航机器人,使用店铺购买的FishBot基础款,并添加一个树莓派来完成自动导航功能,以下是一个大致的步骤指南:
一、准备工作
-
硬件准备:
- FishBot基础款
- 树莓派(推荐带有足够GPIO接口的型号,以便连接传感器和执行器)
- 电源、连接线、USB接口等配件
- 激光雷达或其他距离传感器(用于导航和避障)
- 电机驱动器(如果FishBot未配备)
-
软件准备:
- ROS 2(推荐最新版本)
- 导航相关功能包(如
nav2) - 树莓派操作系统(如Raspbian或Ubuntu Mate for Raspberry Pi)
- Python编程语言(用于编写控制脚本)
二、硬件搭建
-
连接树莓派与FishBot:
- 将树莓派通过USB或串口连接到FishBot的主控板。
- 连接激光雷达或其他传感器到树莓派的GPIO接口。
- 确保电机驱动器与FishBot的电机正确连接。
-
电源管理:
- 确保FishBot和树莓派都有稳定的电源供应。
- 如果需要,可以使用电池组为整个系统供电。
三、软件配置
-
安装ROS 2:
- 在树莓派上安装ROS 2。可以通过官方文档获取安装指南。
- 配置ROS 2环境变量,并安装必要的依赖项。
-
安装导航功能包:
- 安装
nav2功能包,这是ROS 2中用于导航的主要功能包。 - 确保所有相关的依赖项都已正确安装。
- 安装
-
配置导航参数:
- 创建或修改导航配置文件,包括地图文件、定位算法参数、路径规划算法参数等。
- 将地图文件加载到
map_server中。
四、编写控制脚本
-
编写启动文件:
- 编写一个ROS 2的启动文件,用于启动导航功能包和其他必要的节点。
- 确保启动文件中包含了地图、配置文件等必要的信息。
-
编写Python控制脚本:
- 使用Python编写控制脚本,用于接收导航指令并控制FishBot的运动。
- 脚本中应包含与ROS 2节点的通信逻辑,以及控制电机和传感器的代码。
五、调试与测试
-
启动ROS 2核心:
- 在树莓派上启动ROS 2核心,并加载必要的节点。
-
加载地图与导航配置:
- 使用
map_server加载地图文件。 - 配置导航功能包以使用正确的定位算法和路径规划算法。
- 使用
-
测试导航功能:
- 使用RVIZ或其他可视化工具来监控FishBot的导航过程。
- 在RVIZ中设置目标点,并观察FishBot是否能够成功到达目标。
- 根据测试结果调整导航参数和控制脚本。
-
优化性能:
- 根据实际测试情况,对导航算法、控制逻辑和硬件连接进行优化。
- 确保FishBot在复杂环境中也能稳定导航。
六、总结与扩展
-
总结:
- 完成上述步骤后,你应该能够使用ROS 2和树莓派来控制FishBot进行自动导航。
- 回顾整个制作过程,记录遇到的问题和解决方案。
-
扩展:
- 考虑添加更多的传感器和执行器,以提高FishBot的感知能力和运动灵活性。
- 探索ROS 2中的其他功能包和算法,以进一步扩展FishBot的功能。
请注意,以上步骤仅为一个大致的指南,具体实现时可能需要根据FishBot的硬件规格和树莓派的型号进行调整。同时,ROS 2和导航功能包的版本也可能会有所更新,因此建议参考最新的官方文档和教程。
以上为生成回答,仅供参考~
-
-
@1117 看一下配套资料,不需要树莓派也可完成自动导航功能。:https://fishros.org.cn/forum/topic/923/fishbot配套资料教程汇总
如果必须要求使用树莓派,请参考教程
@小鱼 在 FishBot配套资料教程汇总 中说:
拓展1:FishBot配套雷达驱动教程(源码版)
拓展2:树莓派上使用micros-agent驱动主控板的方法
拓展3:FishBot 树莓派配置建图导航 -
@小鱼 小鱼,俺需要基于你的小车,添加一个树莓派完成自动导航机器人,因为是毕设,不加树莓派的话,认为工作量不够,害
-
@1117 那你按照拓展1/2/3尝试一下,遇到具体问题再提问
-
@小伊 树莓派3B可以烧录ubantu22.04吗?
-
树莓派3B可以烧录Ubuntu 22.04。虽然Ubuntu 22.04的官方系统要求中并未直接提及树莓派3B的兼容性,但根据树莓派的硬件性能和社区支持情况,树莓派3B及其后续型号(如3B+)通常能够支持较新版本的Linux操作系统,包括Ubuntu 22.04。
在烧录Ubuntu 22.04到树莓派3B时,需要注意以下几点:
- 硬件要求:确保树莓派3B的硬件配置满足Ubuntu 22.04的基本要求。虽然Ubuntu 22.04的官方要求可能更侧重于x86_64架构的处理器和较大的内存容量,但树莓派3B的ARM架构处理器和1GB内存通常足以支持轻量级到中等负载的Ubuntu 22.04安装。
- 镜像文件:从Ubuntu的官方网站或其他可靠的镜像源下载Ubuntu 22.04的ARM架构镜像文件。确保选择与树莓派兼容的镜像版本。
- 烧录工具:使用适当的工具(如Etcher或Win32DiskImager)将Ubuntu 22.04镜像文件烧录到SD卡上。在烧录之前,请确保SD卡已正确格式化。
- 启动和配置:将烧录好的SD卡插入树莓派3B,然后通电启动。根据屏幕上的指示完成Ubuntu 22.04的初始配置。可能需要设置用户名、密码、时区等基本信息。
- 远程访问:如果需要远程访问树莓派上的Ubuntu 22.04系统,可以配置SSH服务或使用其他远程桌面工具(如xrdp和GNOME桌面)。这允许你从其他计算机上安全地访问和管理树莓派上的系统。
需要注意的是,由于树莓派3B的硬件性能有限,因此在运行Ubuntu 22.04时可能会遇到一些性能瓶颈。如果计划运行资源密集型的应用程序或服务,请考虑使用更高性能的树莓派型号(如4B)或其他更强大的硬件平台。
总之,虽然Ubuntu 22.04不是为树莓派3B量身定制的操作系统,但经过适当的配置和优化,它仍然可以在树莓派3B上运行并提供丰富的功能和良好的用户体验。
以上为生成回答,仅供参考~
-
@小伊 到时候安装ros2,安装32位还是64位的ubantu22.04?
-
在安装ROS 2时,选择32位还是64位的Ubuntu 22.04主要取决于你的具体需求和硬件兼容性。以下是对两种版本的详细分析:
64位Ubuntu 22.04
-
优势:
- 性能:64位系统能够处理更大的内存地址空间,因此在理论上可以提供更好的性能,特别是对于需要大量内存和计算资源的ROS 2应用来说。
- 软件兼容性:许多现代软件和库都优先支持64位系统,因此你可能会遇到更少的兼容性问题。
- 社区支持:由于64位系统更为普遍,因此你可能会获得更广泛的社区支持和资源。
-
适用场景:
- 如果你有足够的硬件资源(如内存和CPU),并且希望获得最佳的性能和兼容性,那么64位Ubuntu 22.04是一个很好的选择。
32位Ubuntu 22.04
-
优势:
- 硬件兼容性:如果你的硬件(如CPU)仅支持32位操作系统,那么32位Ubuntu 22.04将是唯一的选择。
- 特定需求:在某些特定情况下,你可能需要使用32位系统来满足特定的软件或硬件要求。
-
适用场景:
- 如果你的硬件资源有限,或者你的硬件仅支持32位操作系统,那么32位Ubuntu 22.04可能是一个合适的选择。然而,请注意,随着技术的发展,越来越多的硬件和软件开始转向64位支持。
注意事项
- ROS 2支持:ROS 2本身对32位和64位系统都有一定的支持,但具体的支持程度可能因ROS 2的版本和发行版而有所不同。因此,在安装之前,请务必查阅ROS 2的官方文档以获取最新的支持信息。
- 编译需求:如果你需要从源代码编译ROS 2或其组件,那么64位系统可能会提供更广泛的编译工具和库支持。
综上所述,如果你的硬件支持64位操作系统,并且你希望获得最佳的性能和兼容性,那么建议选择64位Ubuntu 22.04来安装ROS 2。如果你的硬件仅支持32位操作系统,或者你有特定的32位软件需求,那么32位Ubuntu 22.04也是一个可行的选择。
以上为生成回答,仅供参考~
-
-
@1117 选64
-
@小伊 好的,谢谢小鱼,我虽然已经知道了(先用32的,失败,然后重新烧了64的,然后成功)

-
@1117 实践出真知~
-
树莓派5无法烧录ubuntu2204,吗
-
@2075605318 肯定是可以的吧,我树莓派3都可以,你可能是烧的版本不对
-
@2075605318 5确实不行
-
@1117 不知道有没有hack方法,主要是有没有定制内核之类的
-
@小鱼 鱼哥,树莓派和买的那个二驱的机器人,一般怎么连接接线呀?
-
@1117 li@ubantu:~$ sudo apt update
忽略:1 https://mirrors.ustc.edu.cn/ubuntu jammy InRelease
忽略:2 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy InRelease
忽略:3 https://packages.ros.org/ros2/ubuntu jammy InRelease
忽略:4 https://mirrors.ustc.edu.cn/ubuntu jammy-updates InRelease
忽略:2 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy InRelease
忽略:3 https://packages.ros.org/ros2/ubuntu jammy InRelease
忽略:5 https://mirrors.ustc.edu.cn/ubuntu jammy-backports InRelease
忽略:3 https://packages.ros.org/ros2/ubuntu jammy InRelease
忽略:2 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy InRelease
忽略:6 https://mirrors.ustc.edu.cn/ubuntu jammy-security InRelease
错误:3 https://packages.ros.org/ros2/ubuntu jammy InRelease
暂时不能解析域名“packages.ros.org”
错误:2 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy InRelease
暂时不能解析域名“mirrors.tuna.tsinghua.edu.cn”
忽略:1 https://mirrors.ustc.edu.cn/ubuntu jammy InRelease
忽略:4 https://mirrors.ustc.edu.cn/ubuntu jammy-updates InRelease
忽略:5 https://mirrors.ustc.edu.cn/ubuntu jammy-backports InRelease
忽略:6 https://mirrors.ustc.edu.cn/ubuntu jammy-security InRelease
忽略:1 https://mirrors.ustc.edu.cn/ubuntu jammy InRelease
忽略:4 https://mirrors.ustc.edu.cn/ubuntu jammy-updates InRelease
忽略:5 https://mirrors.ustc.edu.cn/ubuntu jammy-backports InRelease
忽略:6 https://mirrors.ustc.edu.cn/ubuntu jammy-security InRelease
错误:1 https://mirrors.ustc.edu.cn/ubuntu jammy InRelease
暂时不能解析域名“mirrors.ustc.edu.cn”
错误:4 https://mirrors.ustc.edu.cn/ubuntu jammy-updates InRelease
暂时不能解析域名“mirrors.ustc.edu.cn”
错误:5 https://mirrors.ustc.edu.cn/ubuntu jammy-backports InRelease
暂时不能解析域名“mirrors.ustc.edu.cn”
错误:6 https://mirrors.ustc.edu.cn/ubuntu jammy-security InRelease
暂时不能解析域名“mirrors.ustc.edu.cn”
正在读取软件包列表... 完成
正在分析软件包的依赖关系树... 完成
正在读取状态信息... 完成
有 163 个软件包可以升级。请执行 ‘apt list --upgradable’ 来查看它们。
W: 无法下载 https://mirrors.ustc.edu.cn/ubuntu/dists/jammy/InRelease 暂时不能解析域名“mirrors.ustc.edu.cn”
W: 无法下载 https://mirrors.ustc.edu.cn/ubuntu/dists/jammy-updates/InRelease 暂时不能解析域名“mirrors.ustc.edu.cn”
W: 无法下载 https://mirrors.ustc.edu.cn/ubuntu/dists/jammy-backports/InRelease 暂时不能解析域名“mirrors.ustc.edu.cn”
W: 无法下载 https://mirrors.ustc.edu.cn/ubuntu/dists/jammy-security/InRelease 暂时不能解析域名“mirrors.ustc.edu.cn”
W: 无法下载 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/dists/jammy/InRelease 暂时不能解析域名“mirrors.tuna.tsinghua.edu.cn”
W: 无法下载 https://packages.ros.org/ros2/ubuntu/dists/jammy/InRelease 暂时不能解析域名“packages.ros.org”
W: 部分索引文件下载失败。如果忽略它们,那将转而使用旧的索引文件。
出现这个是什么原因呢?之前还没有。我在尝试解决无法定位软件包的时候出现的 -
@1117 看起来像是电脑没网
-
@1117
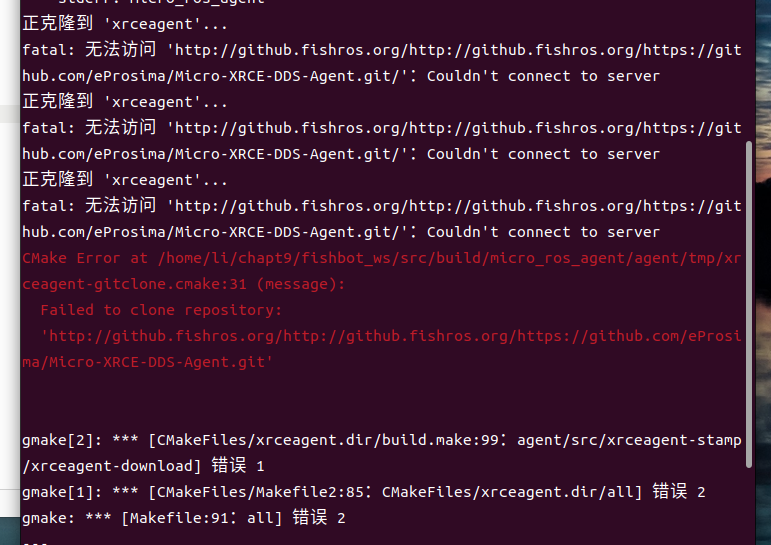 鱼哥,好像就这个克隆一直出问题
鱼哥,好像就这个克隆一直出问题