MicroROS学习板串口监视器没有MPU6050返回的数据
-
@小伊 在 MicroROS学习板串口监视器没有MPU6050返回的数据 中说:
 这个怎么解决
这个怎么解决 -
在MicroROS学习板串口监视器上没有MPU6050返回的数据,可能由多种原因造成。以下是一些可能的解决步骤和考虑因素:
-
检查硬件连接:
- 确保MPU6050传感器与学习板之间的连接正确无误。检查I2C或SPI通信线缆是否插接紧密,没有松动或损坏。
- 确认MPU6050的电源连接正常,电压稳定且足够,因为不稳定的电压可能会影响传感器的性能。
-
检查驱动程序和库文件:
- 如果MPU6050需要特定的驱动程序或库文件才能与学习板通信,请确保这些驱动程序或库文件已经正确安装并配置。
- 检查是否有任何驱动程序冲突或版本不兼容的问题,尝试更新或更换兼容的驱动程序和库文件。
-
检查串口配置:
- 在MicroROS学习板的配置中,检查串口号和波特率设置是否正确。确保这些设置与MPU6050的通信参数相匹配。
- 检查串口监视器的设置,确保它已正确设置为接收来自MPU6050的数据。
-
检查代码和逻辑:
- 在MicroROS的代码中,检查与MPU6050通信相关的部分。确保代码中没有逻辑错误或语法错误,特别是与串口通信和数据读取相关的部分。
- 如果使用的是中断方式读取数据,请确保中断服务程序正确配置并正常工作。
-
考虑外部干扰:
- 检查学习板附近是否有强磁场或其他电子设备,这些设备可能会干扰MPU6050的传感器信号。
- 尝试将学习板移动到其他位置,以排除外部干扰的可能性。
-
重启和重置:
- 尝试重启MicroROS学习板和MPU6050传感器,有时这可以解决通信故障。
- 如果可能的话,尝试断电重置传感器,以恢复其默认设置。
-
查看错误日志和调试信息:
- 检查MicroROS学习板的错误日志和调试信息,看是否有与MPU6050通信相关的错误提示。
- 根据错误提示进行相应的故障排除和修复。
如果以上步骤都无法解决问题,可能需要进一步深入硬件层面进行故障排查,或者联系设备制造商以获取更专业的帮助和支持。
以上为生成回答,仅供参考~
-
-
305页
代码清单9-10https://github.com/rfetick/MPU6050_light.git
https://github.com/fishros/MPU6050_light.git换这个开源库,你的硬件版本是多少的
-
@小鱼 fishbot上的板子,换了之后好了
-
@Constant ok
-
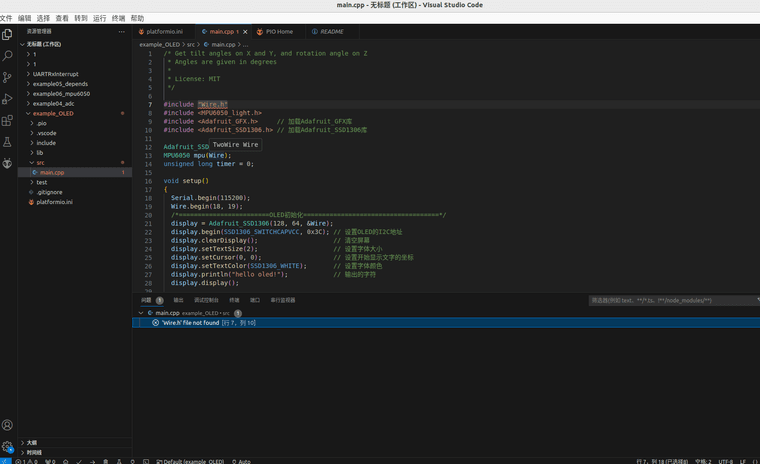
@小鱼 还有一个小问题,就是PIO里的头文件Wire.h一直报红,但是编译上传没问题
-
@Constant 没关系
-
@Constant 哥,是板子的问题吗
-
@小鱼 鱼哥你好,我也是这个问题,请问是怎么解决的
-
@2903547414 你好!不是板子的问题,只需要参考上面鱼哥说的那个链接,把链接改一下就行,是链接错了
-
@2903547414 把这个https://github.com/rfetick/MPU6050_light.git改为这个https://github.com/fishros/MPU6050_light.git就可以了
-
@Constant 谢谢哥