fishbot上有IMU模块,但是第九章最后的小车代码没有IMU部分,想知道这部分代码如何编写
-
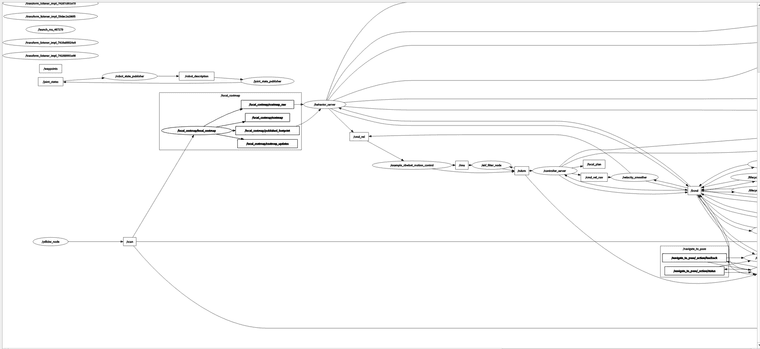
@小鱼 ros2 topic info /cmd_vel -v
Type: geometry_msgs/msg/TwistPublisher count: 6
Node name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.01.f8.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.01.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.0a.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.13.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: behavior_server
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.1e.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: velocity_smoother
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: PUBLISHER
GID: 01.0f.ba.99.6b.2f.2e.4e.00.00.00.00.00.02.69.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteSubscription count: 1
Node name: example_xbwbot_motion_control
Node namespace: /
Topic type: geometry_msgs/msg/Twist
Endpoint type: SUBSCRIPTION
GID: 01.0f.ba.99.ac.26.9b.f6.00.00.00.00.00.00.01.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite -
@1257261547 但是使用ros2 topic echo /cmd_vel和ros2 topic hz /cmd_vel都没有回应
-
-
-
@1257261547bringup.launch.py ```
code_textimport launch_ros from ament_index_python.packages import get_package_share_directory from launch.launch_description_sources import PythonLaunchDescriptionSource def generate_launch_description(): fishbot_bringup_dir = get_package_share_directory( 'xbwbot_bringup') ydlidar_ros2_dir = get_package_share_directory( 'ydlidar') urdf2tf = launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [fishbot_bringup_dir, '/launch', '/urdf2tf.launch.py']), ) microros_agent = launch_ros.actions.Node( package='micro_ros_agent', executable='micro_ros_agent', arguments=['udp4','--port','8888'], output='screen' ) ros_serail2wifi = launch_ros.actions.Node( package='ros_serail2wifi', executable='tcp_server', parameters=[{'serial_port': '/tmp/tty_laser'}], output='screen' ) ydlidar = launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [ydlidar_ros2_dir, '/launch', '/ydlidar_launch.py']), ) # 使用 TimerAction 启动后 5 秒执行 ydlidar 节点 ydlidar_delay = launch.actions.TimerAction(period=5.0, actions=[ydlidar]) return launch.LaunchDescription([ urdf2tf, microros_agent, ros_serail2wifi, ydlidar_delay ]) odom2tf.cppcode_text
#include <rclcpp/rclcpp.hpp> #include <tf2/utils.h> #include <tf2_ros/transform_broadcaster.h> #include <geometry_msgs/msg/transform_stamped.hpp> #include <nav_msgs/msg/odometry.hpp> class OdomTopic2TF : public rclcpp::Node { public: OdomTopic2TF(std::string name) : Node(name) { // 创建 odom 话题订阅者,使用传感器数据的 Qos odom_subscribe_ = this->create_subscription<nav_msgs::msg::Odometry>( "odom", rclcpp::SensorDataQoS(), std::bind(&OdomTopic2TF::odom_callback_, this, std::placeholders::_1)); // 创建一个tf2_ros::TransformBroadcaster用于广播坐标变换 tf_broadcaster_ = std::make_unique<tf2_ros::TransformBroadcaster>(this); } private: rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr odom_subscribe_; std::unique_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_; // 回调函数,处理接收到的odom消息,并发布tf void odom_callback_(const nav_msgs::msg::Odometry::SharedPtr msg) { geometry_msgs::msg::TransformStamped transform; transform.header = msg->header; // 使用消息的时间戳和框架ID transform.child_frame_id = msg->child_frame_id; transform.transform.translation.x = msg->pose.pose.position.x; transform.transform.translation.y = msg->pose.pose.position.y; transform.transform.translation.z = msg->pose.pose.position.z; transform.transform.rotation.x = msg->pose.pose.orientation.x; transform.transform.rotation.y = msg->pose.pose.orientation.y; transform.transform.rotation.z = msg->pose.pose.orientation.z; transform.transform.rotation.w = msg->pose.pose.orientation.w; // 广播坐标变换信息 tf_broadcaster_->sendTransform(transform); }; }; int main(int argc, char **argv) { rclcpp::init(argc, argv); auto node = std::make_shared<OdomTopic2TF>("odom2tf"); rclcpp::spin(node); rclcpp::shutdown(); return 0; } navigation2.launch.pycode_text
import launch import launch_ros from ament_index_python.packages import get_package_share_directory from launch.launch_description_sources import PythonLaunchDescriptionSource def generate_launch_description(): # 获取与拼接默认路径 fishbot_navigation2_dir = get_package_share_directory( 'xbwbot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') rviz_config_dir = os.path.join( nav2_bringup_dir, 'rviz', 'nav2_default_view.rviz') # 创建 Launch 配置 use_sim_time = launch.substitutions.LaunchConfiguration( 'use_sim_time', default='true') map_yaml_path = launch.substitutions.LaunchConfiguration( 'map', default=os.path.join(fishbot_navigation2_dir, 'maps', 'room.yaml')) nav2_param_path = launch.substitutions.LaunchConfiguration( 'params_file', default=os.path.join(fishbot_navigation2_dir, 'config', 'nav2_params.yaml')) return launch.LaunchDescription([ # 声明新的 Launch 参数 launch.actions.DeclareLaunchArgument('use_sim_time', default_value=use_sim_time, description='Use simulation (Gazebo) clock if true'), launch.actions.DeclareLaunchArgument('map', default_value=map_yaml_path, description='Full path to map file to load'), launch.actions.DeclareLaunchArgument('params_file', default_value=nav2_param_path, description='Full path to param file to load'), launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [nav2_bringup_dir, '/launch', '/bringup_launch.py']), # 使用 Launch 参数替换原有参数 launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ), launch_ros.actions.Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen'), ]) odom_ekf.launch.pycode_text
import launch import launch_ros def generate_launch_description(): package_name = 'xbwbot_navigation2' ld = launch.LaunchDescription() pkg_share = launch_ros.substitutions.FindPackageShare(package=package_name).find(package_name) robot_localization_node = launch_ros.actions.Node( package='robot_localization', executable='ekf_node', name='ekf_filter_node', output='screen', parameters=[os.path.join(pkg_share, 'config/ekf.yaml'), {'use_sim_time': launch.substitutions.LaunchConfiguration('use_sim_time')}], remappings=[('odometry/filtered', 'odom')], ) ld.add_action(launch.actions.DeclareLaunchArgument(name='use_sim_time', default_value='True', description='Flag to enable use_sim_time')) ld.add_action(robot_localization_node) return ld -
@1257261547 这个是电脑的发布的话题,不是小车发的,这样查不对
-
@1257261547 你先切回不融合的导航,判断一下小车这边有没有问题
-
@小鱼
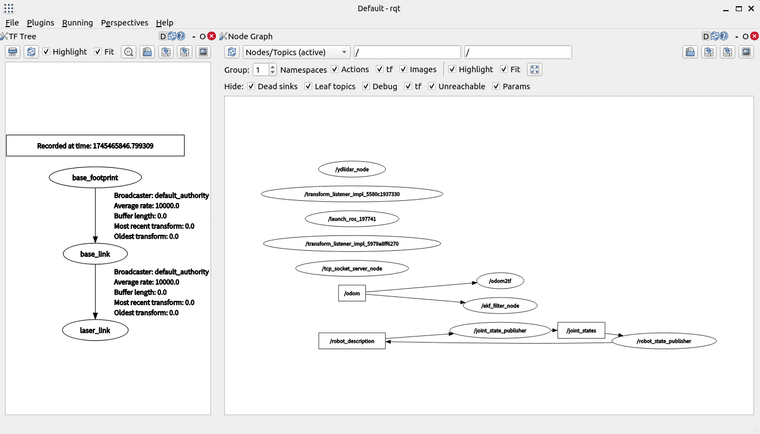
启动bringup.launch.py后rqt图像,导航也不能正常运行 -
code_text main.cpp #include <Arduino.h> #include <Esp32PcntEncoder.h> #include <Esp32McpwmMotor.h> #include <PidController.h> #include <Kinematics.h> #include <Warning.h> #include <ImuDriver.h> #include <WiFi.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <geometry_msgs/msg/twist.h> #include <nav_msgs/msg/odometry.h> #include <micro_ros_utilities/string_utilities.h> #include <sensor_msgs/msg/imu.h> rcl_allocator_t allocator; rclc_support_t support; rclc_executor_t executor; rcl_node_t node; rcl_subscription_t sub_cmd_vel; geometry_msgs__msg__Twist msg_cmd_vel; rcl_publisher_t pub_odom; nav_msgs__msg__Odometry msg_odom; rcl_timer_t timer; rcl_publisher_t pub_imu; sensor_msgs__msg__Imu msg_imu; Esp32PcntEncoder encoders[2]; // 创建一个数组用于存储两个编码器 Esp32McpwmMotor motor; // 创建一个名为motor的对象,用于控制电机 PidController pid_controller[2]; Kinematics kinematics; MPU6050 mpu(Wire); // 初始化MPU6050对象 ImuDriver imu(mpu); // 初始化Imu对象 imu_t imu_data; // IMU 数据对象 float target_linear_speed = 20.0; // 单位 毫米每秒 float target_angular_speed = 0.1; // 单位 弧度每秒 float out_left_speed = 0.0; // 输出的左右轮速度,不是反馈的左右轮速度 float out_right_speed = 0.0; void start() { pinMode(TRIG, OUTPUT); pinMode(ECHO, INPUT); pinMode(WARN, OUTPUT); } void timer_callback(rcl_timer_t* timer,int64_t last_call_time) { odom_t odom = kinematics.get_odom(); int64_t stamp = rmw_uros_epoch_millis(); msg_odom.header.stamp.sec = static_cast<int32_t>(stamp/1000); msg_odom.header.stamp.nanosec = static_cast<int32_t>((stamp%1000)*1e6); msg_odom.pose.pose.position.x = odom.x; msg_odom.pose.pose.position.y = odom.y; msg_odom.pose.pose.orientation.w = cos(odom.angle*0.5); msg_odom.pose.pose.orientation.x = 0; msg_odom.pose.pose.orientation.y = 0; msg_odom.pose.pose.orientation.z = sin(odom.angle*0.5); msg_odom.twist.twist.linear.x = odom.linear_speed; msg_odom.twist.twist.angular.z = odom.angular_speed; imu.getImuDriverData(imu_data); msg_imu.header.stamp.sec = static_cast<int32_t>(stamp / 1000); // 秒部分 msg_imu.header.stamp.nanosec = static_cast<uint32_t>((stamp % 1000) * 1e6); // 纳秒部分 msg_imu.angular_velocity.x = imu_data.angular_velocity.x; msg_imu.angular_velocity.y = imu_data.angular_velocity.y; msg_imu.angular_velocity.z = imu_data.angular_velocity.z; msg_imu.linear_acceleration.x = imu_data.linear_acceleration.x; msg_imu.linear_acceleration.y = imu_data.linear_acceleration.y; msg_imu.linear_acceleration.z = imu_data.linear_acceleration.z; msg_imu.orientation.x = imu_data.orientation.x; msg_imu.orientation.y = imu_data.orientation.y; msg_imu.orientation.z = imu_data.orientation.z; msg_imu.orientation.w = imu_data.orientation.w; if(rcl_publish(&pub_odom,&msg_odom,NULL)!=RCL_RET_OK) { Serial.printf("error: odom pub failed!"); } if(rcl_publish(&pub_imu, &msg_imu, NULL)!=RCL_RET_OK) { Serial.printf("error: imu pub failed!"); } } void twist_callback(const void * msg_in) { const geometry_msgs__msg__Twist* msg = (const geometry_msgs__msg__Twist*)msg_in; target_linear_speed = msg->linear.x*1000; target_angular_speed = msg->angular.z; kinematics.kinematics_inverse(target_linear_speed, target_angular_speed, &out_left_speed, &out_right_speed); Serial.printf("OUT:left_speed=%f,right_speed=%f\n", out_left_speed, out_right_speed); pid_controller[0].update_target(out_left_speed); pid_controller[1].update_target(out_right_speed); } void microros_task(void* args) { IPAddress agent_ip; agent_ip.fromString("192.168.188.93"); set_microros_wifi_transports("xbw_mi","Xbw159357",agent_ip,8888); delay(2000); allocator = rcl_get_default_allocator(); rclc_support_init(&support,0,NULL,&allocator); rclc_node_init_default(&node,"example_xbwbot_motion_control","",&support); unsigned int num_handles = 3; rclc_executor_init(&executor,&support.context,num_handles,&allocator); rclc_subscription_init_best_effort(&sub_cmd_vel,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(geometry_msgs,msg,Twist),"/cmd_vel"); rclc_executor_add_subscription(&executor,&sub_cmd_vel,&msg_cmd_vel,&twist_callback,ON_NEW_DATA); msg_odom.header.frame_id = micro_ros_string_utilities_set(msg_odom.header.frame_id,"odom"); msg_odom.child_frame_id = micro_ros_string_utilities_set(msg_odom.child_frame_id,"base_footprint"); msg_imu.header.frame_id = micro_ros_string_utilities_set(msg_imu.header.frame_id,"imu"); rclc_publisher_init_best_effort(&pub_odom,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(nav_msgs,msg,Odometry),"/odom"); rclc_publisher_init_best_effort(&pub_imu,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(sensor_msgs, msg, Imu),"/imu"); rclc_timer_init_default(&timer,&support,RCL_MS_TO_NS(50),timer_callback); rclc_executor_add_timer(&executor,&timer); while(!rmw_uros_epoch_synchronized()) { rmw_uros_sync_session(1000); delay(10); } rclc_executor_spin(&executor); } // v=wr r = v/w void setup() { // 初始化串口 Serial.begin(115200); // 初始化串口通信,设置通信速率为115200 // 初始化电机驱动器2 encoders[0].init(0, 32, 33); // 初始化第一个编码器,使用GPIO 32和33连接 encoders[1].init(1, 26, 25); // 初始化第二个编码器,使用GPIO 26和25连接 // 初始化PID控制器的参数 pid_controller[0].update_pid(0.625, 0.125, 0.0); pid_controller[1].update_pid(0.625, 0.125, 0.0); pid_controller[0].out_limit(-100, 100); pid_controller[1].out_limit(-100, 100); // 初始化运动学参数 kinematics.set_wheel_distance(175); // mm kinematics.set_motor_param(0, 0.103657); kinematics.set_motor_param(1, 0.103657); // 测试下运动学逆解 xTaskCreate(microros_task,"microros_task",10240,NULL,1,NULL); start(); imu.begin(18, 19); } void loop() { digitalWrite(TRIG, HIGH); delayMicroseconds(10); digitalWrite(TRIG, LOW); double delta_time = pulseIn(ECHO, HIGH); float detect_distance = delta_time * 0.0343 / 2; if(detect_distance<50) { digitalWrite(WARN,HIGH); } else { digitalWrite(WARN,LOW); } delayMicroseconds(9990); kinematics.update_motor_speed(millis(), encoders[0].getTicks(), encoders[1].getTicks()); motor.updateMotorSpeed(0, pid_controller[0].update(kinematics.get_motor_speed(0))); motor.updateMotorSpeed(1, pid_controller[1].update(kinematics.get_motor_speed(1))); // Serial.printf("speed1=%d,speed2=%d\n",kinematics.get_motor_speed(0),kinematics.get_motor_speed(1)); // Serial.printf("x,y,yaw=%f,%f,%f\n",kinematics.get_odom().x,kinematics.get_odom().y,kinematics.get_odom().angle); imu.update(); }我使用的main.cpp,PidController.h和PidController.h与第九章的代码相同,ImuDriver.h和.cpp是从https://github.dev/fishros/fishbot_motion_control_microros复制过来的。
-
@1257261547 rviz2-2] Start navigation
[rviz2-2] [INFO] [1745497363.868824195] [rviz_navigation_dialog_action_client]: NavigateToPose will be called using the BT Navigator's default behavior tree.
[component_container_isolated-1] [INFO] [1745497363.872257788] [bt_navigator]: Received goal preemption request
[component_container_isolated-1] [INFO] [1745497363.872403577] [bt_navigator]: Begin navigating from current location (0.00, -0.00) to (1.05, 0.00)
[component_container_isolated-1] [INFO] [1745497364.692875360] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497365.742881062] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [ERROR] [1745497366.442902586] [controller_server]: Failed to make progress
[component_container_isolated-1] [WARN] [1745497366.442952090] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[component_container_isolated-1] [INFO] [1745497366.462306032] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[component_container_isolated-1] [INFO] [1745497366.462780905] [controller_server]: Received a goal, begin computing control effort.
[component_container_isolated-1] [WARN] [1745497366.605222290] [controller_server]: Control loop missed its desired rate of 20.0000Hz
[component_container_isolated-1] [INFO] [1745497366.762580448] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497367.805310394] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497368.805358332] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497369.855392133] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497370.855281188] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497371.905391343] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497372.905353942] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497373.955312447] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497375.005326343] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497376.005308559] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [ERROR] [1745497376.605300615] [controller_server]: Failed to make progress
[component_container_isolated-1] [WARN] [1745497376.605337470] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[component_container_isolated-1] [INFO] [1745497376.622371024] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[component_container_isolated-1] [INFO] [1745497376.622500163] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap
[component_container_isolated-1] [WARN] [1745497376.963242230] [planner_server]: Planner loop missed its desired rate of 20.0000 Hz. Current loop rate is 2.9370 Hz
[component_container_isolated-1] [INFO] [1745497376.982935132] [controller_server]: Received a goal, begin computing control effort.
[component_container_isolated-1] [INFO] [1745497378.033336652] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497379.083338474] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497380.083353905] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497381.133347869] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497382.133331860] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497383.183344989] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497384.183333075] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497385.233355170] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497386.233343583] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [ERROR] [1745497386.983379433] [controller_server]: Failed to make progress
[component_container_isolated-1] [WARN] [1745497386.983441386] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[component_container_isolated-1] [INFO] [1745497387.002286852] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[component_container_isolated-1] [INFO] [1745497387.002565414] [controller_server]: Received a goal, begin computing control effort.
[component_container_isolated-1] [WARN] [1745497387.205118703] [controller_server]: Control loop missed its desired rate of 20.0000Hz
[component_container_isolated-1] [INFO] [1745497387.257316611] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497388.305240840] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497389.305246853] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497390.355189344] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497391.405191109] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497392.405226643] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497393.455190198] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497394.455174699] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497395.505252445] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [INFO] [1745497396.555201464] [controller_server]: Passing new path to controller.
[component_container_isolated-1] [ERROR] [1745497397.205337698] [controller_server]: Failed to make progress
[component_container_isolated-1] [WARN] [1745497397.205551926] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[component_container_isolated-1] [INFO] [1745497397.222854104] [behavior_server]: Running spin
[component_container_isolated-1] [INFO] [1745497397.223028066] [behavior_server]: Turning 1.57 for spin behavior
现在rqt显示正常但是执行导航时报错 -
@1257261547 ros2 topic echo /imu --once
header:
stamp:
sec: 1745497834
nanosec: 466000000
frame_id: imu
orientation:
x: -0.0013860630569979548
y: 2.695150215004105e-05
z: -0.4447702169418335
w: 0.8956436514854431
orientation_covariance:- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
angular_velocity:
x: -0.14848875999450684
y: -0.1138010025024414
z: -0.09535890817642212
angular_velocity_covariance: - 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
linear_acceleration:
x: -0.006431763060390949
y: 0.0023521725088357925
z: 1.0046474933624268
linear_acceleration_covariance: - 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
fishros@fishros-linux:~/chapt9/xbwbot_ws$ ros2 topic echo /odom --once
header:
stamp:
sec: 1745497879
nanosec: 265000000
frame_id: odom
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -8.742278000372475e-08
w: -0.9999999999999962
covariance:- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: - 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
fishros@fishros-linux:~/chapt9/xbwbot_ws$ ros2 topic echo /cmd_vel --once
linear:
x: 0.125
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -0.16fishros@fishros-linux:~/chapt9/xbwbot_ws$ ros2 topic echo /cmd_vel --once
linear:
x: 0.24631578947368427
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -0.26315789473684215 -
main.cpp里有一段超声波测距的代码是用于实现小车距离障碍过近时蜂鸣器告警的。
-
@1257261547 你用我编译好的固件,用配置助手直接下载,先排除固件问题
-
@小鱼
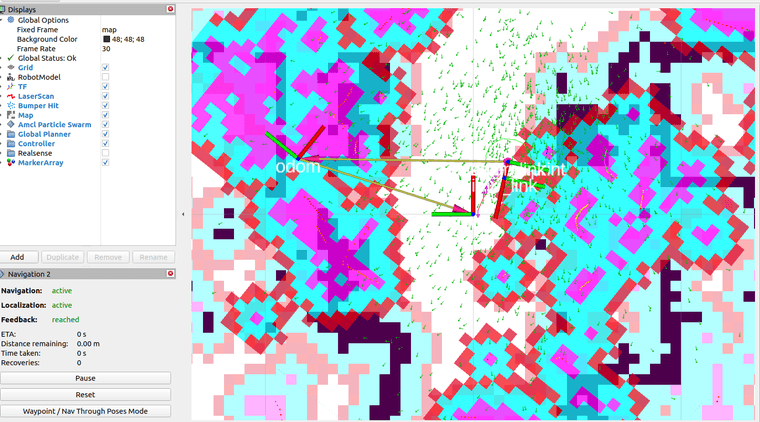
大佬,启用了robot_localization之后启动导航,但是odom的漂移还是非常明显,这是正常的吗?有什么办法减小这种漂移吗? -
@1257261547 看起来像是地图问题,有点乱,检查检查雷达和网络连接,fishbot的里程计本身还是蛮稳定的