动手学ROS2 rviz2不显示雷达信息解决方案
-
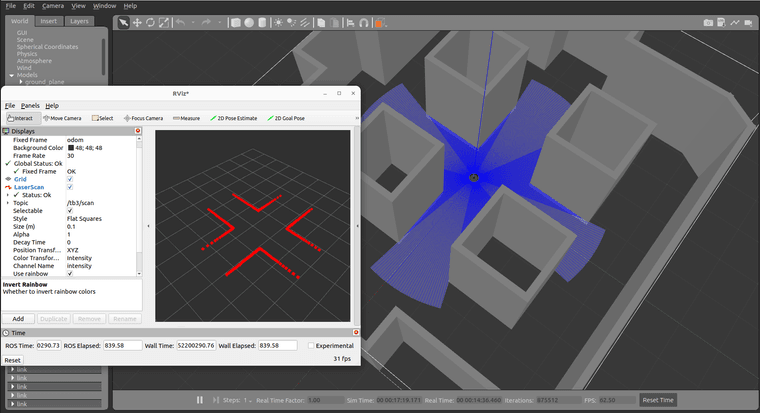
回复: 动手学ROS2 rviz2不显示雷达信息 不显示雷达信息的原因因该是robot_state_publisher没有正确发布导致的,雷达坐标系静态变化不正确。Position Transformer和Color transformer的内容是空白也是这个原因。解决方法是修改launch文件添加如下代码 (在启动gazebo和启动机器人urdf之后添加robot_state_publisher) :
# Robot State Publisher - 发布robot description和静态transforms robot_state_publisher_node = Node( package='robot_state_publisher', executable='robot_state_publisher', name='robot_state_publisher', output='screen', parameters=[{'robot_description': robot_desc, 'use_sim_time': True}] # 使用仿真时间 )之后再次编译后启动可观察到雷达结果(fixed frame选择odom,调整size到0.1)!
-
Q q33551144 在 中 引用了 这个主题